1. Введение
Прошло достаточно много времени с момента написания статьи "Вниз
по лестнице, ведущей вверх... или ЭМОС в низкочастотном звене АС",
и нетрудно предположить, что столь многообещающее направление в конструировании
НЧ-акустики, практически не имеющее альтернативы по сочетанию параметров,
будет развиваться и далее, постепенно совершенствуясь.
Изменения в идеологии построения всей системы и отдельных узлов не
были революционными ![]() ,
но позволили значительно улучшить параметры системы с ЭМОС и добиться большей
повторяемости при изготовлении. Вот, по-порядку, и рассмотрим, над чем шла
работа, и что из этого получилось. Иногда полезно приостановиться, оглянуться
на сделанное и подвести промежуточный итог...
,
но позволили значительно улучшить параметры системы с ЭМОС и добиться большей
повторяемости при изготовлении. Вот, по-порядку, и рассмотрим, над чем шла
работа, и что из этого получилось. Иногда полезно приостановиться, оглянуться
на сделанное и подвести промежуточный итог...
2. Немного теории
Современные методы разработки аппаратуры базируются, как правило, на предварительном моделировании прототипа устройства в различных симуляторах. Это позволяет быстро опробовать множество вариантов реализации как отдельных узлов, так и всего будущего изделия в целом, глубже разобраться в критических местах, выбрать оптимальную конфигурацию, сократить и упростить этап натурного макетирования. Симуляторы оперируют моделями элементов, и чем точнее будут эти модели, тем ближе к реальности получится результат. Оптимизация системы с ЭМОС стала возможна благодаря уточнению как общей концепции построения ЭМОС по ускорению, так и уточнению собственно модели "динамик в ЗЯ+пьезоакселерометр". Очень упрощенная модель этой связки выглядит так:
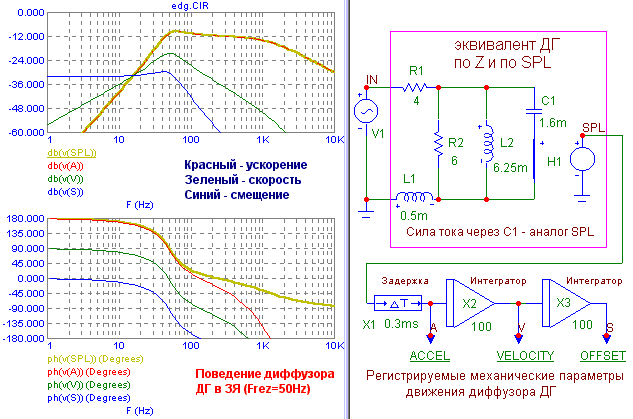
Рис.1
Она позволяет смоделировать импеданс головки, оценить АЧХ по звуковому давлению (SPL) и получить выходные сигналы, пропорциональные ускорению, скорости и смещению диффузора динамика. Параметр задержки в модели позволяет учесть конечную скорость механических/акустических процессов. Выходной сигнал скорости получается (по определению) через интегрирование сигнала ускорения, а выходной сигнал, пропорциональный смещению - интегрированием сигнала скорости. Если приближать эту модель к реальности, то надо учесть, как минимум, еще два паразитных фактора: резонанс самой конструкции датчика и влияние деформации диффузора при работе на выходной сигнал акселерометра. К сожалению, в модели трудно учесть эффекты, возникающие при выходе диффузора динамика из поршневого режима работы, поэтому результаты моделирования все равно будут несколько отличаться от результатов измерений реальной системы.
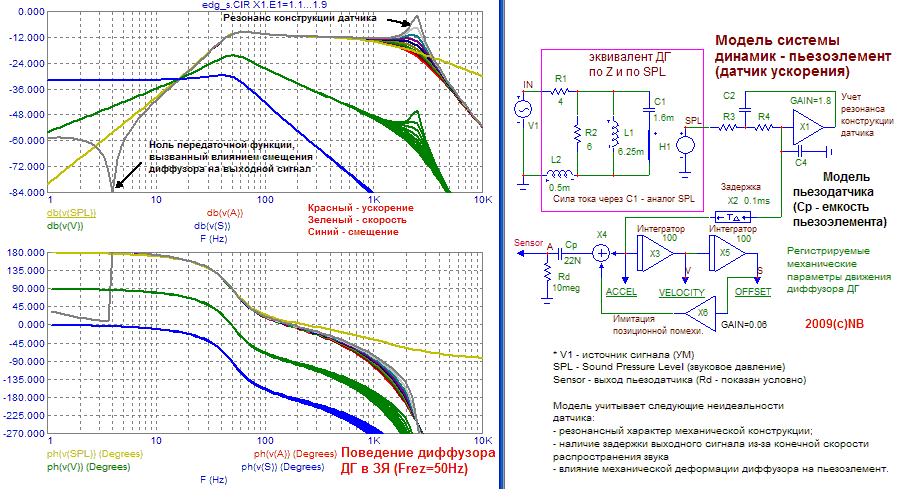
Рис.2
По графикам на рис.2 видно, что чем меньше добротность
резонанса конструкции датчика и чем выше находится этот резонанс по частоте
- тем лучше, так как для нейтрализации его влияния потребуются более простые
схемотехнические решения.
Большой проблемой при реализации ЭМОС может стать "завязка"
выходного сигнала датчика на деформации диффузора динамика из-за неидеальности
конструкции. Дело в том, что сигнал, пропорциональный смещению диффузора,
противофазен сигналу ускорения и, при замыкании петли ЭМОС, на ИНЧ возможно
ухудшение устойчивости системы, так как ООС переходит в ПОС и при увеличении
петлевого усиления система может стать нестабильной или даже возбудиться.
Признаком хорошей развязки датчика от влияния деформации диффузора является
отсутствие в его выходном сигнале "нуля" передаточной функции или
его проявление на как можно более низкой частоте.
Анализ фазочастотных характеристик (Рис.1) показывает нам, что
выходной сигнал ускорения имеет фазовый сдвиг от +180 градусов до нуля в интересующей
нас полосе частот. Заведение такого сигнала в обратную связь приведет к тому,
что на ИНЧ система просто возбудится.
Очевидно, что для правильного построения ЭМОС по ускорению нам
необходимо в петлю ООС ввести корректирующее устройство, которое бы обеспечивало
постоянный фазовый сдвиг в 90 градусов для создания запаса по фазе на ИНЧ,
и имело спадающую к ВЧ АЧХ, чтобы обеспечить уменьшение петлевого усиления
на верхней границе рабочего диапазона (сформировать правый склон АЧХ петлевого
усиления). На эту роль лучше всего подходит обычный интегратор. Он позволяет
автоматически сформировать и левый склон АЧХ петлевого усиления, так как второй
порядок спада, обусловленный типом акустического оформления (ЗЯ), скорректируется
интегратором до первого порядка. Исходя их вышесказанного, упрощенная функциональная
схема ЭМОС приобретет следующий вид -
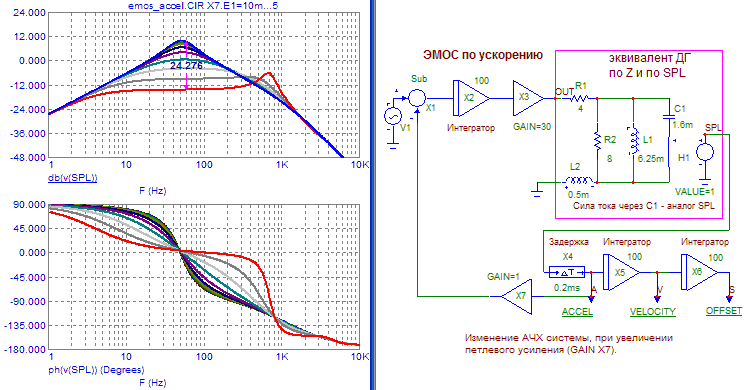
Рис.3
Как видно из графика, АЧХ динамика по SPL может
быть линеаризована к ИНЧ до 5...10Гц. Поведение АЧХ реального динамика на
частотах 400...1000Гц, естественно, отличается от теоретического, так как
на этих частотах заканчивается поршневой диапазон работы диффузора.
Интересно посмотреть, как при моделировании будет вести себя
в ЭМОС наша усложненная модель пьезодатчика:
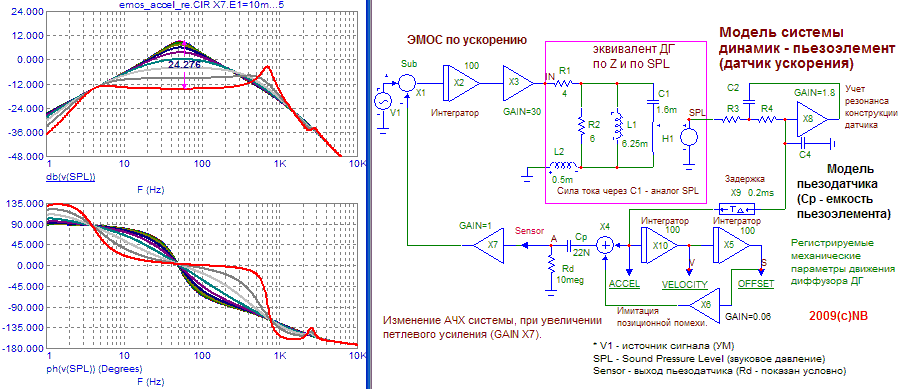
Рис.4
Видим, что на АЧХ в ИНЧ-области появился небольшой
горб, вызванный тем, что на этих частотах сигнал обратной связи с датчика
отсутствует ("ноль" передаточной характеристики), на СЧ также несколько
ухудшилась устойчивость. Но терпимо ![]() .
Осталось выбрать оптимальную глубину ЭМОС и ограничить диапазон воспроизводимых
сабвуфером частот как сверху, так и снизу.
.
Осталось выбрать оптимальную глубину ЭМОС и ограничить диапазон воспроизводимых
сабвуфером частот как сверху, так и снизу.
Теперь подумаем, а нужна ли нам в реальной жизни акустика, воспроизводящая
звук от 5Гц? Тем более обеспечение приемлимого звукового давления на этой
частоте потребует как применения усилителя мощности с повышенной выходной
мощностью, так и динамической головки с огромным объемным смещением. Максималисты
так и могут сделать, нам же, реалистам ![]() ,
пока придется идти на компромисс - ограничивать снизу воспроизводимый звуковой
диапазон частотами 16...20Гц. Если говорить честно, то столь низкие частоты
с большой амплитудой достаточно редко встречаются в музыкальных записях, основная
же причина, по которой желательно, чтобы акустика имела линейную АЧХ до этих
частот, а при возможности и ниже - это уменьшение искажений огибающей НЧ-сигнала,
напрямую связанное с ГВЗ системы. Несколько ранее в статьях "Групповое
Время Задержки" и "Моделирование
ФВЧ с аппроксимацией АЧХ по Баттерворту" я касался этого вопроса.
Возвращаясь к компромиссу - ограничение снизу диапазона частот можно сделать
несколькими способами, начиная с применения входного сабсоник-фильтра и заканчивая
оптимальным распределением усиления в петле ЭМОС. Обратим внимание на введенное
корректирующее звено - интегратор. Реально, получается там сделать только
неидеальный интегратор, имеющий ограничение усиления на ИНЧ. Если недостающую
добавку по усилению ввести в предусилитель пьезодатчика, то можно сформировать
желательный ход АЧХ по звуковому давлению на ИНЧ (спад первым порядком с добротностью
равной 0,5), при котором рост ГВЗ будет еще не столь значительным. Как это
сделать будет рассмотрено несколько позже.
,
пока придется идти на компромисс - ограничивать снизу воспроизводимый звуковой
диапазон частотами 16...20Гц. Если говорить честно, то столь низкие частоты
с большой амплитудой достаточно редко встречаются в музыкальных записях, основная
же причина, по которой желательно, чтобы акустика имела линейную АЧХ до этих
частот, а при возможности и ниже - это уменьшение искажений огибающей НЧ-сигнала,
напрямую связанное с ГВЗ системы. Несколько ранее в статьях "Групповое
Время Задержки" и "Моделирование
ФВЧ с аппроксимацией АЧХ по Баттерворту" я касался этого вопроса.
Возвращаясь к компромиссу - ограничение снизу диапазона частот можно сделать
несколькими способами, начиная с применения входного сабсоник-фильтра и заканчивая
оптимальным распределением усиления в петле ЭМОС. Обратим внимание на введенное
корректирующее звено - интегратор. Реально, получается там сделать только
неидеальный интегратор, имеющий ограничение усиления на ИНЧ. Если недостающую
добавку по усилению ввести в предусилитель пьезодатчика, то можно сформировать
желательный ход АЧХ по звуковому давлению на ИНЧ (спад первым порядком с добротностью
равной 0,5), при котором рост ГВЗ будет еще не столь значительным. Как это
сделать будет рассмотрено несколько позже.
Несколько слов к целесообразности использования УМ типа ИТУН
в системе с ЭМОС. Высокое выходное сопротивление ИТУНа не производит электрического
демпфирования подвижной системы динамика. А оно в нашем случае и не нужно
- контроль над перемещением диффузора производит ЭМОС. А так как ИТУН и динамик
находятся внутри петли ООС, то образующийся при отсутствии электрического
демпфирования резонансный горб на АЧХ эффективно линеаризуется этой силовой
(электромеханической) обратной связью. При этом получается, что в резонансной
области ИТУН просто отдает звуковой катушке динамика ровно столько тока, сколько
надо для перемещения или торможения его диффузора. То есть, при работе динамика
в ЭМОС без электрического демпфирования диффузора низким выходным сопротивлением
усилителя просто нет излишней потери энергии ни в звуковой катушке, ни в оконечном
каскаде этого УМ. А демпфирование диффузора есть ![]() и немалое, так как датчик отслеживает попытки его неконтролируемого перемещения,
вызывая появление компенсирующего сигнала ошибки.
и немалое, так как датчик отслеживает попытки его неконтролируемого перемещения,
вызывая появление компенсирующего сигнала ошибки.
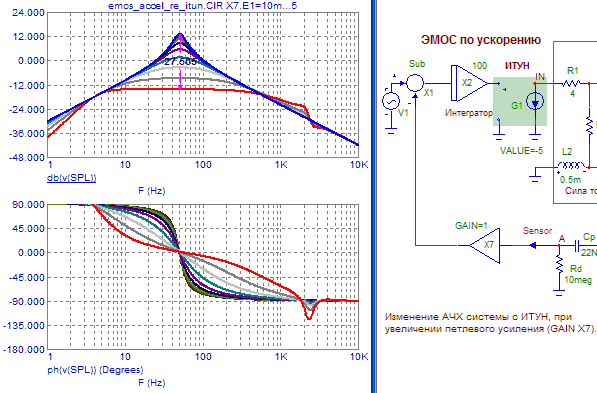
Рис.5
Из результатов моделирования системы ЭМОС с ИТУНом
видно, что на резонансной частоте выросла глубина ЭМОС, и как бонус - имеем
улучшение устойчивости системы на СЧ за счет лучшей фазовой характеристики
(исключено влияние индуктивности звуковой катушки динамика).
На этом, наверное, небольшую теоретическую часть можно закончить
и перейти к практике.
3. Что изменилось
- Датчик.
Предположу, что в повторении ЭМОС многих останавливала сложность
изготовления датчика ускорения, описанного в предыдущей статье. Поэтому дальнейшие
усилия были направлены не только на улучшение параметров датчика, но и упрощение
его конструкции, повышение технологичности. Удачной находкой в выборе конструкционных
материалов оказалось применение сферических донышек от алюминиевых банок с
популярным в народе напитком ![]() (подробности ищем в Гугле по запросу "банки алюминиевые глубокой вытяжки",
например тут - http://www.upakovano.ru/business/gost/1195.php ).
(подробности ищем в Гугле по запросу "банки алюминиевые глубокой вытяжки",
например тут - http://www.upakovano.ru/business/gost/1195.php ).
Достоинства очевидны - электростатическая экранировка, немагнитность,
малый вес, жесткость, отсутствие выраженных резонансов в широкой полосе частот,
наконец, простота в обработке. К недостаткам можно отнести сложность пайки
алюминия, но эту операцию можно обойти. В общей сложности было последовательно
опробовано порядка семи-восьми разных версий датчиков. В процессе доводки
конструкции датчика определились следующие критерии:
- конструкция должна состоять из двух основных частей - сенсора
и адаптера. Сенсор состоит из пьезоэлемента с подводящими проводниками, и
конструктива для их крепления, а адаптер, предназначенный для закрепления
сенсора на диффузоре, в зависимости от формы и размеров этого диффузора может
иметь различную геометрию, также базирующуюся на сферических формах (от банок
емкостью как на 0,5л - max Ф=66мм, так и 1л- max Ф=84мм).
- Способ соединения сенсора с адаптером, а также соединения всего
датчика в сборе, с диффузором, должны быть прочным и эластичными.
- Наилучшим со всех точек зрения (максимальная развязка от деформаций,
высокая резонансная частота) оказалось крепление пьезодиска не по периметру,
а за центральную часть. Также эластичное.
- Сам пьезодиск также нуждается в демпфировании собственного резонанса.
- Подводящие проводники должны быть гибкими, тонкими и отформованы
с изгибом, чтобы исключить передачу через них механических воздействий на
пьезодиск.
А теперь посмотрим, как это выглядит в "железе". Сначала
рассмотрим подготовленные к монтажу составные части - слева основание сенсора
(ф30мм) с приклеенной по центру на суперклей ("Монолит"
секундный клей) цилиндрической стоечкой (отрезок пластикового корпуса
от обычного фломастера с Ф9мм и высотой 3мм), справа - адаптер. В нем по периметру
проделаны отверстия (мне была удобна разметка для 12 отверстий), необходимые
для того, чтобы а) облегчить, б) не создавать избыточного давления воздуха
под датчиком в) ослабить влияние деформаций, передающихся с внешнего периметра
адаптера к центру. На переднем плане - пьезодиск (тип FML-20T-6.0A1-100, Ф20мм
или аналогичный) с припаянными выводами и покрытый лаком со стороны обкладки
для защиты от влажности (утечек тока) и окисления.

Рис.6
В основании сенсора просверлено три отверстия -
одно для сигнального провода и два рядом - для получения контактной площадки
"земля". Сквозь эти два отверстия несколько раз с натяжкой продевается
голый луженый проводник, образующий точку для припайки, аналогично делается
корпусная контактная площадка на адаптере, только провод проходит через одно
отверстие и через край. Электрический контакт "земли" с корпусными
элементами датчика необходим для электростатической экранировки.
Можно было бы, конечно, применив флюс для пайки алюминия, просто
залудить эти участки, но практика показала, что не такое простое это дело
![]() .
.
Далее - на тыльную сторону пьезодиска для демпфирования его резонанса наклеиваем
тонкую изоленту в один слой. Потом к торцу цилиндрической стоечки на герметик
приклеиваем по центру наш подготовленный пьезодиск. Герметиком надо смазывать
обе склеиваемые поверхности. Я использовал "Гермент"
- Момент универсальный, обладающий хорошей адгезией. Наверное, можно вместо
лака для защиты пьезодиска воспользоваться тем же герметиком, но я не пробовал.
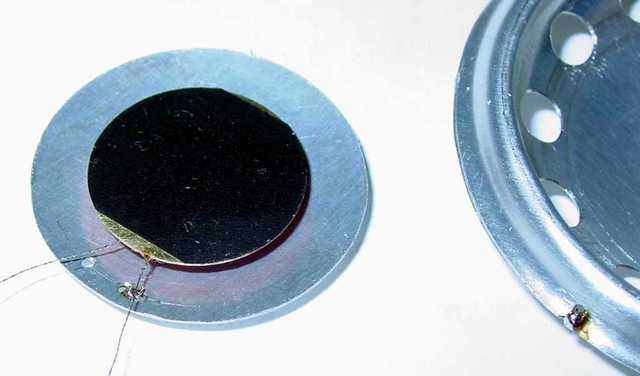
Рис.7
Естественно, корпусной вывод пьезоэлемента должен находиться напротив корпусного контакта сенсора, и в сборе плоскость пьезопластинки оказывается в одной плоскости с краями чашки сенсора. На следующем фото (слева) видна формовка выводов этой версии датчика, также можно посмотреть, как это было сделано в предыдущем варианте датчика (фото справа, на ориентацию пьезопластинки "лицом" вверх не обращайте внимания) -


Рис.8
Вся формовка должна производиться после схватывания
герметика, соединяющего пьезодиск с сенсором. Иначе может нарушиться центровка
пьезодиска или ухудшение прочности этого соединения. На сигнальный провод
после формовки и вставления в отверстие необходимо надеть короткий отрезок
изоляции от обычного монтажного провода, подходящего по внешнему диаметру
отверстию в чашке сенсора и смонтировать в него. После этого производится
фиксация этого места суперклеем. Кстати, на правом фото можно рассмотреть,
как трудно качественно выполнить пайку алюминия ![]() .
.
Идем далее - герметиком по периметру склеиваются вместе сенсор
и адаптер. Схематично на разрезе датчика показаны основные моменты сборки
-

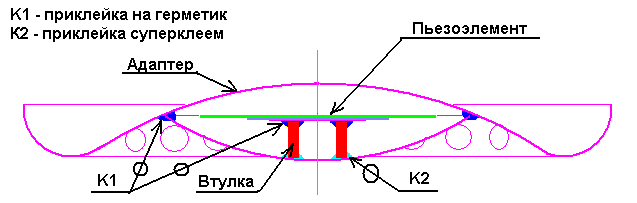
Рис.9
После схватывания герметика производится окончательный монтаж выводов к внешнему краю адаптера (для исключения замыкания выводов на корпус можно также их немного зафиксировать герметиком). Сигнальная контактная площадка выполнена из кусочка фольгированного текстолита, приклеенного на суперклей рядом с корпусным контактом -

Рис.10
Датчик готов к установке на диффузор. При такой конструкции можно отказаться от приклеивания датчика к торцу звуковой катушки, хотя такой вариант тоже не может быть исключен. Приклейка производится аналогичным герметиком. После схватывания герметика можно подключить датчик к тонкому внешнему сигнальному экранированному проводу (показана подпайка одного из предыдущих вариантов). Этот провод на диффузоре и раме динамика фиксируется термоклеем.


Рис.11
На всех стадиях изготовления датчика желательно
помнить, что от результата работы будет зависеть качество всей системы ![]() .
.
- Усилитель мощности.
При работе ИТУНа на динамическую головку наблюдается совсем нежелательный
подъем АЧХ к ВЧ, вызванный наличием собственной индуктивности у звуковой катушки.
Для нашего применения лучше этот эффект нейтрализовать, так как сложнее будет
бороться с резонансами датчика. Кроме того, не помешает некоторое демпфирование
диффузора вне полосы действия ЭМОС. Добиться этого можно с помощью введения
частотнозависимой ООС, при этом на СЧ/ВЧ происходит снижение выходного сопротивления
ИТУНа и автоматически получается выравнивание частотной характеристики. На
картинке с симуляцией хорошо видно, что происходит при увеличении R3 от нуля
до 1 килоома.
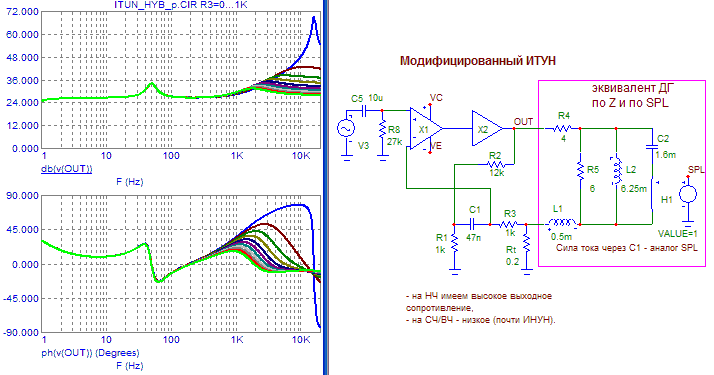
Рис.12
Практическая схема такого модифицированного ИТУНа и его АЧХ на реальной нагрузке (желтый график) представлены на следующих рисунках:
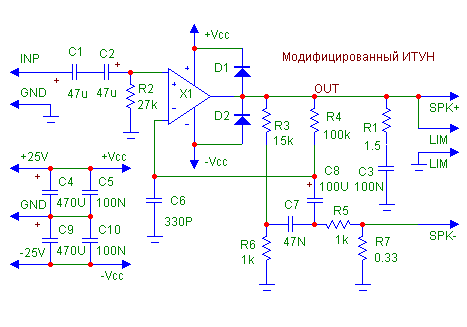
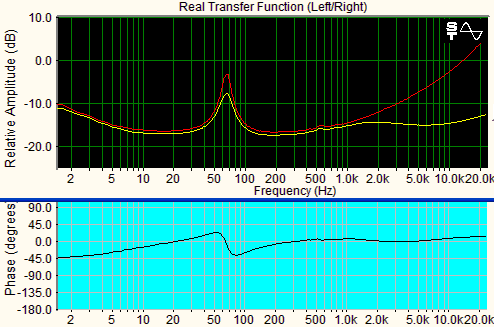
Рис.13
Х1 - интегральный УМЗЧ типа LM1875T или TDA2050,
номинал токового датчика R7 рассчитан под применение динамика с импедансом
8ом, R1,C3 - даташитная антизвонная цепочка. При желании на базе её печатной
платы можно собрать и натуральный ![]() ИТУН неустановкой лишних деталей.
ИТУН неустановкой лишних деталей.
- ЭМОС-процессор
Основная часть схемы управления базируется на принципах, изложенных
в теоретической части (Рис.4). Рассмотрим её более подробно.
Основное отличие - ликвидированы межкаскадные разделительные конденсаторы
благодаря введению серво-ООС (интегратора), охватывающей все узлы, что улучшило
устойчивость всей системы на ИНЧ, так как уменьшился паразитный фазовый набег
в этой частотной области. Схема предусилителя практически не изменилась, из
сравнивающего устройства был удален ФНЧ (который переехал в предусилитель),
упростилась схема корректора, благодаря улучшенной конструкции датчика. Цепочка
R2C1 первым порядком уменьшает петлевое усиление выше 1КГц, и этого хватает
для того, чтобы ЭМОС не возбуждалась на резонансах датчика.
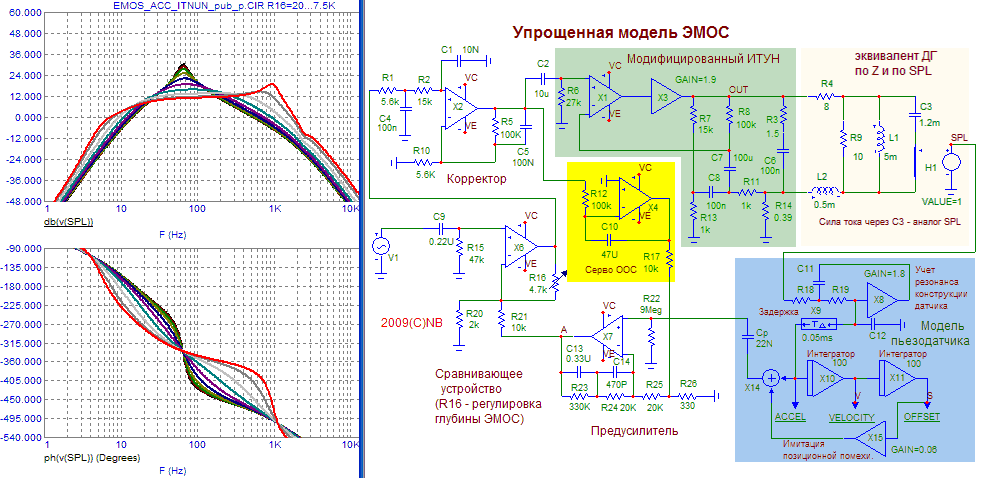
Рис14.
Оценить точность модели можно, сравнив с результатами замеров реальной системы на динамике 10ГД-30Е в тестовом боксе объёмом 19 литров в процессе увеличения ручной регулировкой (R16) глубины ЭМОС -
Рис.15
Синий график - АЧХ на выходе предусилителя при замкнутом
входном конденсаторе С9, зеленый график - АЧХ, эквивалентная SPL также при
замкнутом С9, желтый график (+фаза) - АЧХ, эквивалентная SPL уже при разомкнутом
С9 (то есть, задействован ФВЧ 1-го порядка как сабсоник-фильтр ниже 16Гц).
Можно сравнить АЧХ системы, полученные с выхода акселерометра
и микрофона (микрофон установлен почти вплотную к диффузору), интересно также,
я думаю, посмотреть на реальные графики ГВЗ. За что и боролись ![]() -
-
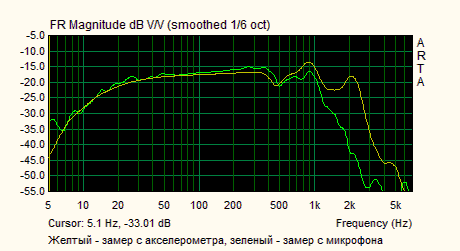
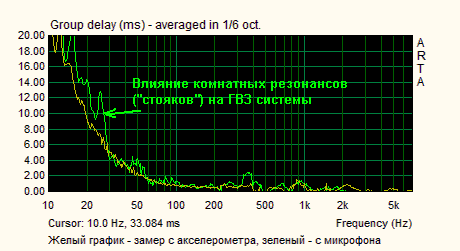
Рис.16
Однако вернемся к упрощенной схеме ЭМОС (Рис.14).
На первый взгляд, корректор не похож на интегратор ![]() .
Но, приглядевшись, можно увидеть, что R1C4 первым порядком срезают АЧХ выше
280Гц, а цепочка R5C5 вместе с R10 в ООС операционного усилителя Х2 производит
подъем АЧХ первым порядком ниже тех же 280Гц. На следующей иллюстрации это
рассмотрено более подробно.
.
Но, приглядевшись, можно увидеть, что R1C4 первым порядком срезают АЧХ выше
280Гц, а цепочка R5C5 вместе с R10 в ООС операционного усилителя Х2 производит
подъем АЧХ первым порядком ниже тех же 280Гц. На следующей иллюстрации это
рассмотрено более подробно.
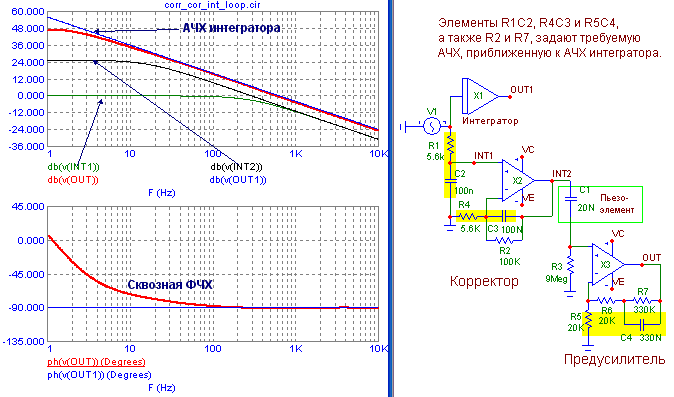
Рис.17
Постоянная времени R1C2 выбрана равной тау R4C3
(Рис.17). Это позволяет сформировать АЧХ корректора (в диапазоне частот от
16Гц и выше) идентичную АЧХ интегратора. Тау R2C3 определяет, ниже какой частоты
этот интегратор перестанет быть интегратором. Для R2C3=10mS имеем F=16Гц.
Для того чтобы сформировать желаемую АЧХ по SPL, в ООС предусилителя введена
цепочка R6C4, поднимающая АЧХ ниже 24Гц первым порядком. Красный график показывает,
как выглядит сквозная АЧХ корректора и предусилителя, включая неявно имеющуюся
дифференцирующую цепочку C1R3, образующуюся за счет емкостного характера пьезодатчика.
Сабсоник-фильтр первого порядка на C9R15 (Рис.14) ограничивает амплитуду сигналов
ниже 16Гц. Таким образом, синтезированная АЧХ ЭМОС по звуковому давлению ниже
24Гц имеет спад 6дБ/окт, а ниже 16Гц - 12дБ/окт. Это актуально для 8"
вуфера, для 10" можно частоты понизить, соответственно до 20/10Гц, пересчитав
номиналы цепочек С9R15 и С13R24 (Рис.14).
Возвращаясь к схеме корректора - поясню, почему выбрана такая
конфигурация схемы. Дело в том, что в силу каких-то причин может возникнуть
потребность подавить очень сильный резонанс датчика (неудачная реализация).
В этом случае на базе этой же конфигурации корректора можно собрать эллиптический
фильтр/режектор.
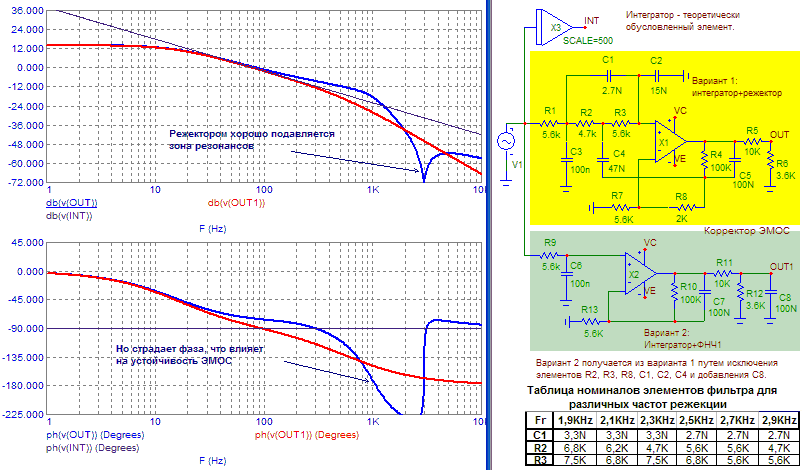
Рис.18
На печатной плате процессора ЭМОС реализована возможность собрать оба варианта корректоров. Помощь при выборе необходимого варианта корректора может оказать несложный графоаналитический метод - накладываем прямую с наклоном +20дБ/дек. на график АЧХ динамика, полученного с датчика ускорения, так, чтобы эта прямая выше себя отсекала от графика как можно большую площадь. Таким образом, визуально легко производится учет вклада АЧХ интегратора, присутствующего в петле ЭМОС. Тут же можно оценить максимальную достижимую глубину ЭМОС - 26дБ в этом случае.
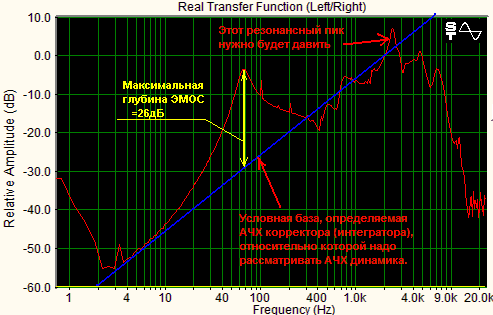
Рис.19
В области частот выше 1...2КГц увидим резонансный
пик, который должен быть устранен корректором, иначе произойдет самовозбуждение
системы - фазовый набег на этих частотах переводит ООС в ПОС. По величине
превышения этого пика над базовой линией принимаем решение по выбору конфигурации
корректора. С пиками на АЧХ, лежащими ниже 1КГц ничего делать не надо - ЭМОС
их сама будет выравнивать, так как в этой области частот действует ООС.
- Сервис
К нему относятся софт-старт и динамический лимитер. Схема софт-старта
практически не изменилась, а про лимитер надо рассказать подробнее.
Ну, сначала - зачем он вообще нужен ![]() .
Начнем с основной цели - это позволяет расширить динамический диапазон на
НЧ путем предотвращения перегрузки динамика ограничением максимальной амплитуды
сигнала. С другой стороны, основное требование к свойствам лимитера - субъективная
незаметность срабатывания этого аппаратного средства при воспроизведении музыки.
Эти достаточно противоречивые требования можно попробовать примирить путем
динамического ограничения полосы рабочих частот сабвуфера со стороны НЧ/ИНЧ,
так как это наиболее проблемная для воспроизведения звука область диапазона,
особенно в системах с ЭМОС. Обусловлено это тем, что при выравнивании АЧХ
с помощью ЭМОС, сквозное усиление в тракте на частотах, лежащих ниже частоты
резонанса динамика, значительно возрастает, и вызвать перегрузку тракта можно
уже достаточно слабым НЧ/ИНЧ-сигналом. Необходимость исключения перегрузки
тракта с ЭМОС также вызывается тем, что, например, при возникновении клиппинга
в усилителе, разрывается петля ЭМОС и возросший сигнал ошибки "вгоняет"
УМ в еще больший клиппинг, чреватый увеличенным временем выхода из него после
снятия входного сигнала, вызвавшего перегрузку.
.
Начнем с основной цели - это позволяет расширить динамический диапазон на
НЧ путем предотвращения перегрузки динамика ограничением максимальной амплитуды
сигнала. С другой стороны, основное требование к свойствам лимитера - субъективная
незаметность срабатывания этого аппаратного средства при воспроизведении музыки.
Эти достаточно противоречивые требования можно попробовать примирить путем
динамического ограничения полосы рабочих частот сабвуфера со стороны НЧ/ИНЧ,
так как это наиболее проблемная для воспроизведения звука область диапазона,
особенно в системах с ЭМОС. Обусловлено это тем, что при выравнивании АЧХ
с помощью ЭМОС, сквозное усиление в тракте на частотах, лежащих ниже частоты
резонанса динамика, значительно возрастает, и вызвать перегрузку тракта можно
уже достаточно слабым НЧ/ИНЧ-сигналом. Необходимость исключения перегрузки
тракта с ЭМОС также вызывается тем, что, например, при возникновении клиппинга
в усилителе, разрывается петля ЭМОС и возросший сигнал ошибки "вгоняет"
УМ в еще больший клиппинг, чреватый увеличенным временем выхода из него после
снятия входного сигнала, вызвавшего перегрузку.
В предыдущей конструкции проблема перегрузки решалась динамическим
уменьшением глубины ЭМОС во всей полосе частот. То есть при увеличении амплитуды
сигнала на выходе УМ выше некоторого заданного порога, в корректоре начинал
действовать аттенюатор на полевом транзисторе, снижающий усиление в тракте,
что приводило к уменьшению усиления на ИНЧ и минимизации последствий в петле
ЭМОС при клиппинге в УМ.
В данной реализации лимитера в ЭМОС применен несколько иной принцип
(Рис.20) - в тракт вводится дополнительная частотнозависимая местная ООС,
которая избирательно уменьшает петлевое усиление, приводящее к уменьшению
подъема АЧХ в основном на ИНЧ, что в свою очередь ограничивает снизу полосу
воспроизводимых сабвуфером частот. На мидбасе и выше, глубина ЭМОС падает
в меньшей степени, позволяя сохранить коэффициент нелинейных искажений в допустимых
пределах. Параметры этой ООС (Rfr - фоторезистор оптрона) выбраны таким образом,
чтобы в процессе регулирования ГВЗ воспроизводимого звукового сигнала не выходило
за допустимые рамки. Для обеспечения требуемого диапазона перестройки было
увеличено усиление в тракте ЭМОС на участке Х5-Х3 на 10дБ, которое затем было
ограничено делителем R11R12. Оказалось целесообразным перенести конденсатор
С4, корректирующий резонанс датчика, на выход этого делителя, так как при
работе лимитера его эффективность бы уменьшалась, из-за того, что в этом случае
он оказывался внутри петли местной ООС, образованной цепочкой лимитера Rfr+R16||C8+R18.
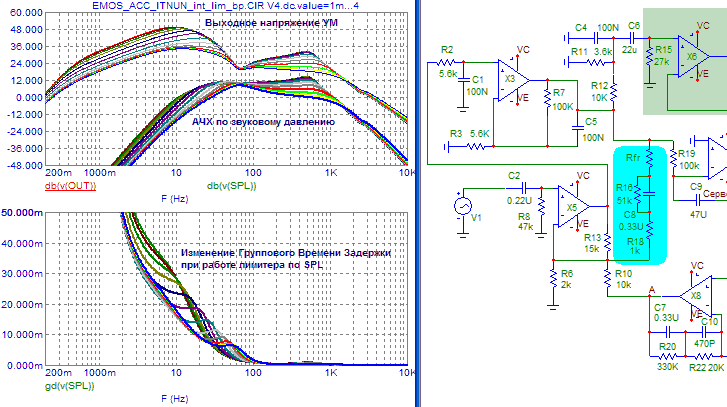
Рис.20
Прежде, чем рассмотреть работу лимитера на нестационарном сигнале, познакомимся со схемой управления и принципом её работы. В качестве регулирующего элемента применен, как уже было отмечено, резисторный оптрон. Светодиод оптрона засвечивает площадку фоторезистора и изменяет её сопротивление. Для управления оптроном предлагается следующая схема (читаем комментарии на рисунке) -
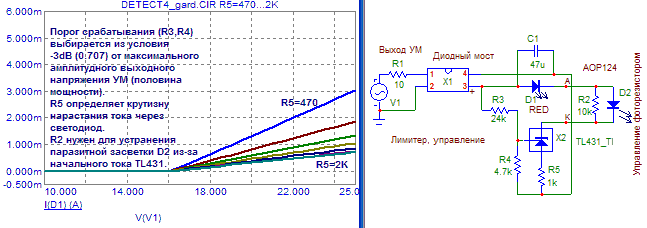
Рис.21
Емкость конденсатора С1 и номинал резистора R1 выбраны из условий обеспечения субъективно-оптимальных времен срабатывания и отпускания лимитера. D1 индицирует моменты вступления лимитера в действие. Порог срабатывания установлен из условия обеспечения двукратного запаса по выходной мощности УМ, чтобы обеспечить возможность "выбега" за этот порог выходного сигнала УМ, вследствие имеющейся инерционности, как схемы управления, так и оптрона. Для моделирования переходных процессов была создана функциональная модель оптрона, учитывающая закон изменения его сопротивления от тока в цепи светодиода и его собственные постоянные времени уменьшения и нарастания сопротивления. Но подробное рассмотрение этой модели не входит в цели этой статьи. Итак - рассматриваем работу ЭМОС с лимитером на нестационарном сигнале типа ToneBurst.
Рис.22
Выходной сигнал УМ попадает на управляющую схему лимитера, при превышении порога срабатывания происходит изменение параметров местной регулирующей ООС (выделено цветом). В свою очередь, как было рассмотрено, изменяется АЧХ тракта ЭМОС, ограничивая усиление на НЧ/ИНЧ. Применение подобного лимитера позволяет расширить динамический диапазон сабвуфера на 12...15дБ. Желающие промоделировать самостоятельно, могут скачать этот файл в формате МС8.
- Предусилитель
Он необходим для суммирования сигналов левого и правого каналов
(например, для трифоника), инверсии фазы, регулировки усиления и ограничения
полосы рабочих частот. Схема достаточно тривиальная ![]() -
-

Рис.23
Поэтому рассказывать тут особо нечего, лучше привести чертеж печатной платы и перейти к следующему пункту -
4. Конструкция
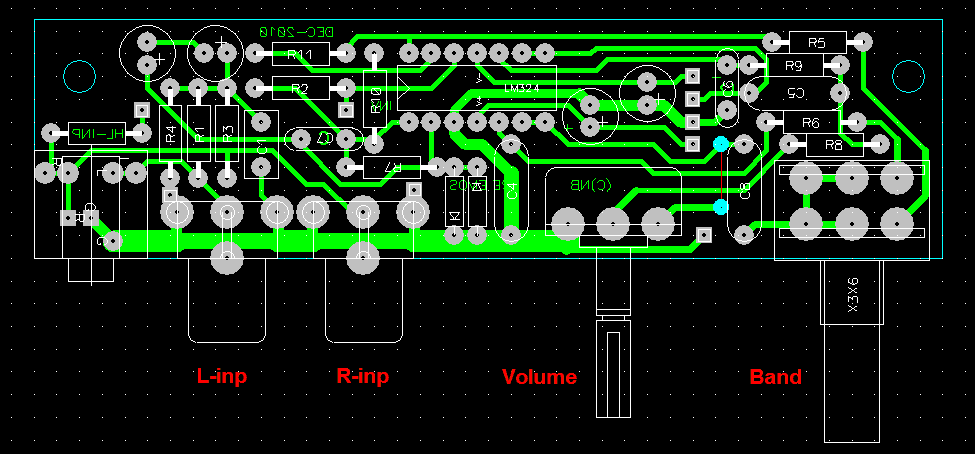
Рис.24
Фото этого узла в сборе (есть некоторые отличия в примененных деталях) -
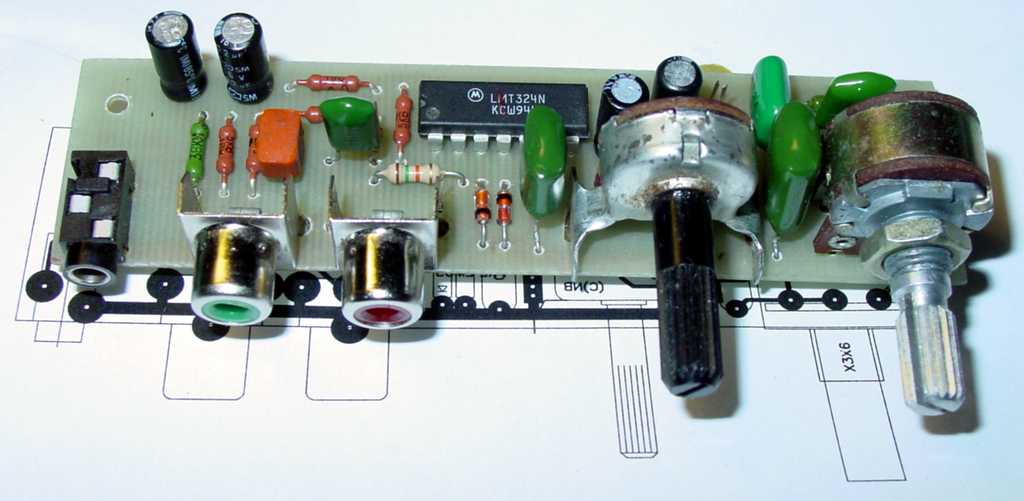
Рис.25
И для желающих повторить этот узел - её
PDF-страничку с проводниковым слоем под ЛУТ (лазерно-утюжной технологии
![]() ) (* Все чертежи
печатных плат даны для некоммерческого использования).
) (* Все чертежи
печатных плат даны для некоммерческого использования).
Конструктивно основной узел - ЭМОС-процессор также выполнен в виде автономного модуля. Вот его полная схема -
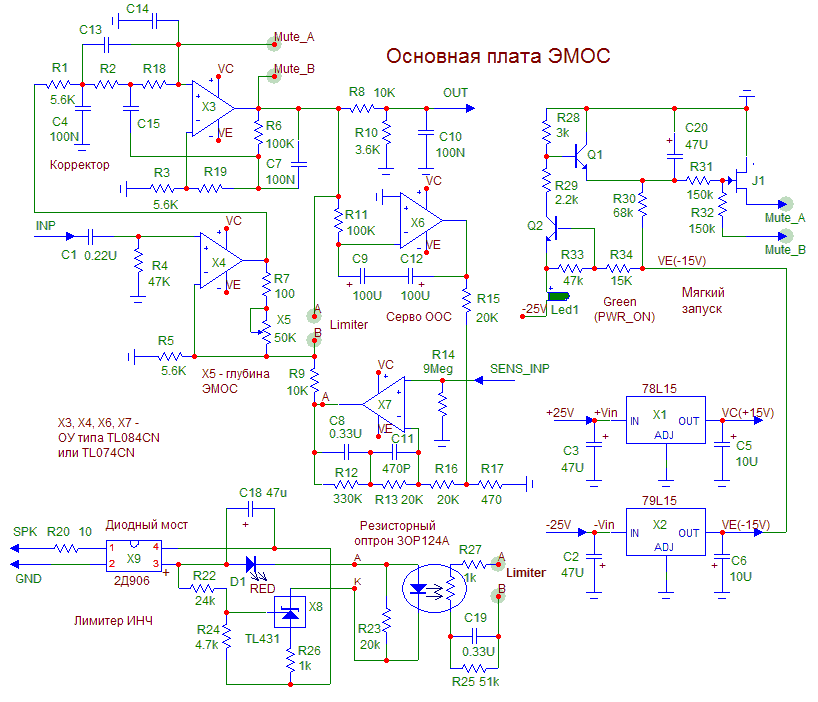
Рис.26
Номиналы элементов R2, R18, R19, C13, C14, C15 умышленно не указаны, так как должны рассчитываться под конкретную частоту резонанса датчика. Об этом я уже упоминал - смотрим рис.18. Для второго варианта корректора вместо R18, R19 впаиваются перемычки, C13, C14, C15 не впаиваются. R2 берется в диапазоне 10...15К для того, чтобы обеспечить нормальную работу софт-старта. Так как R14 имеет большой номинал (а лучше еще больше), то его проще набрать из нескольких резисторов. В печатной плате предусмотрено последовательное соединение максимум трех резисторов (R141, R142, R142).
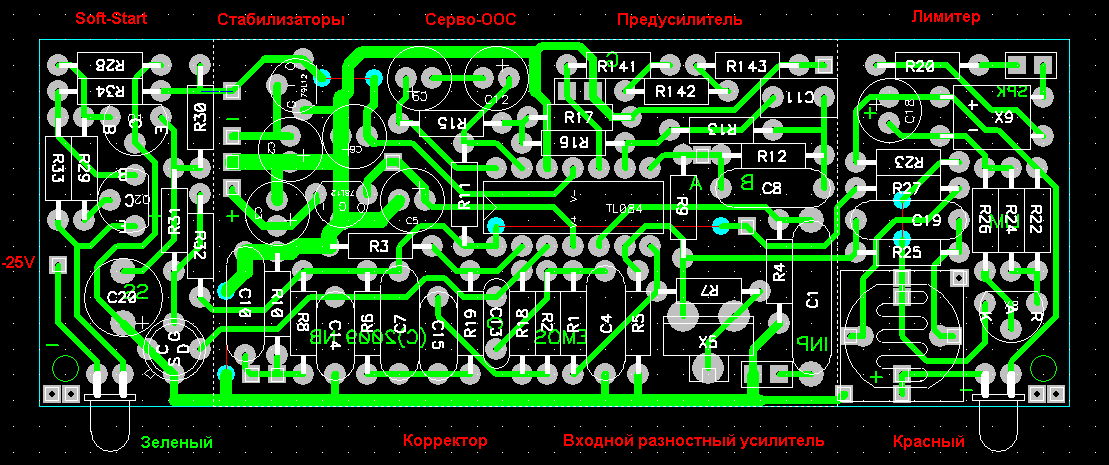
Рис.27
Для любителей всё упрощать в печатке предусмотрено
пространственное разделение функциональных узлов (если Soft-Start и лимитер
без надобности - их можно не паять, или вообще урезать ![]() печатку). И для изготовления платы - PDF-печатка.
А в сборе эта плата смотрится так -
печатку). И для изготовления платы - PDF-печатка.
А в сборе эта плата смотрится так -

Рис.28
В качестве оптрона здесь взят отечественный АОР124А (или 3ОР124А), хотя можно самому скомбинировать подходящие светодиод и фоторезистор, закрыв их потом светозащитным экраном. Так было сделано в следующей версии ЭМОС-процессора:
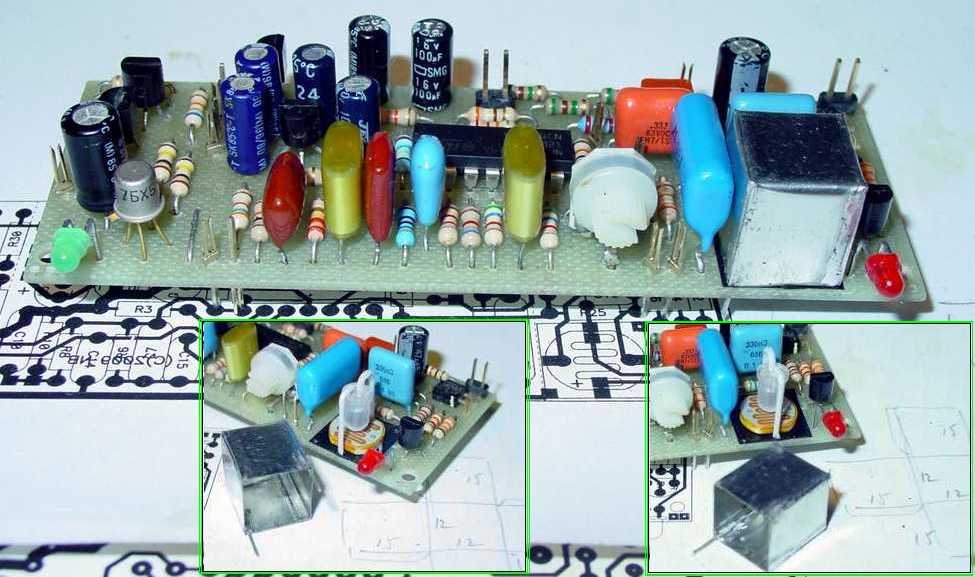
Рис.28а
Схему модифицированного ИТУНа я уже приводил, для желающих повторить
её один в один предлагается следующий конструктив -
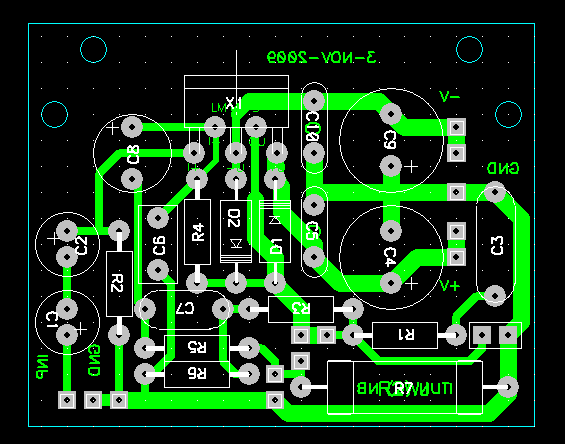

Рис.29
Радиатор, показанный на рисунке - использован временно
для наладки платы. Штатный радиатор изолирован от корпуса микросхемы УН тонкой
полиимидной прокладкой, с промазкой термопастой КПТ-8. PDF-печатка для повторения
- здесь.
Блок питания - обычный, трансформаторный (ТПП258), двуполярный
на +_25V, емкость конденсаторов по выходу ~10000мкф. По питающей сети стоит
синфазный помехоподавляющий фильтр. Для простоты был собран в корпусе от компьютерного
БП. Все электронные узлы ЭМОС предполагается смонтировать на задней стенке
корпуса сабвуфера. Основная электроника размещается в специальном отсеке,
блок питания - внутри АС.
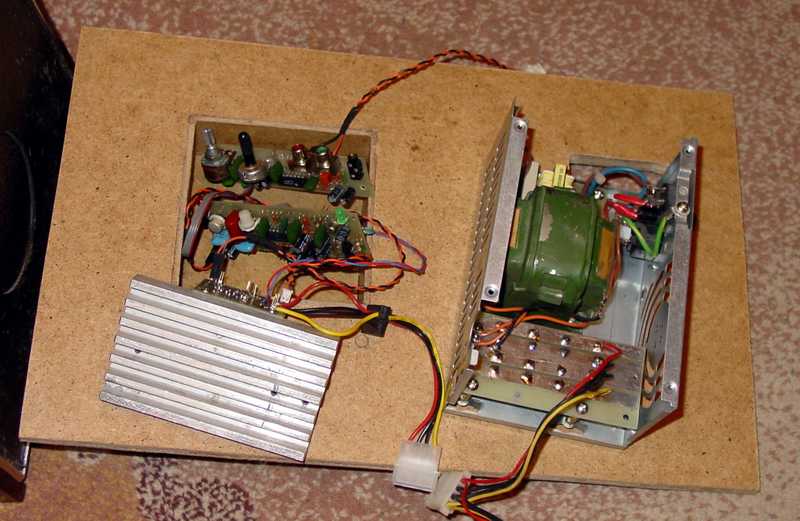
Рис.30
При желании платы управления ЭМОС можно разместить и в наружном, отдельном корпусе, в этом случае их можно скомпоновать следующим образом (как пример) -

Рис.31
Или же, предусилитель вынести в другое место, где будет удобно осуществлять регулировку и подключение кабелей. У меня, как я уже писал, всё встраивается в единый отсек, где находятся УМ, основная плата и предусилитель. Модульная конструкция позволяет при необходимости добавить к электронике сабвуфера узлы для дополнительной обработки сигнала, например, параметрический фильтр для компенсации недостатков АЧХ комнаты для прослушивания.

Рис.32
Для крепления плат использовались компьютерные заглушки от дисководов 3,5", в качестве лицевых панелей - корпусные заглушки 5,25" от CD-ROM, между собой их нужно потом просто склеить.
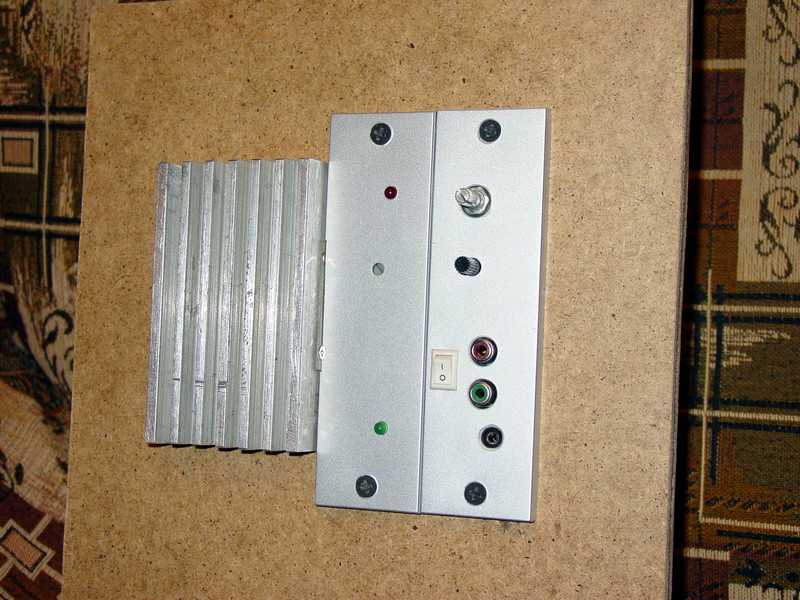
Рис.33
Все это хозяйство на шурупах крепится к задней стенке
АС (электрически заземленный радиатор УМ - с небольшим зазором для улучшения
условий охлаждения). Отверстия с проводами, выходящими во внутренний объем
АС, герметизируются пластилином. Блок питания изнутри шурупами притягивается
к задней стенке через тонкую прокладку из вспененного полиэтилена для герметичности.
Не забываем, что у нас должен получиться ЗЯ ![]()
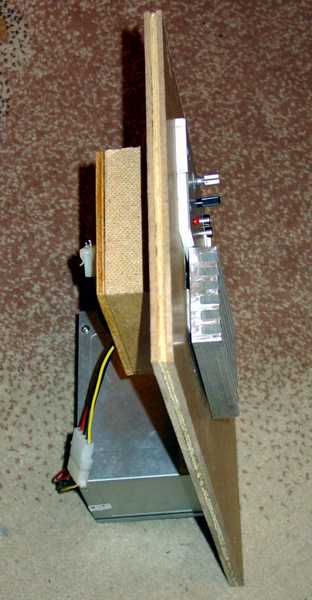
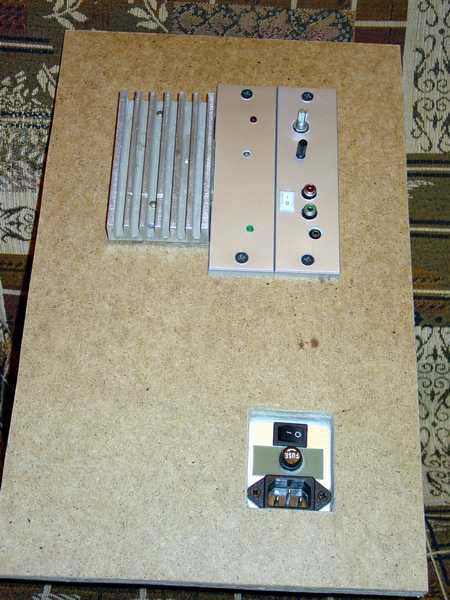
Рис.34
Ну, дальше все просто ![]() - монтируем динамик в корпус АС, подключаем к разъемам, устанавливаем через
герметизирующую прокладку на свое место заднюю стенку АС, настраиваем оптимальную
глубину ЭМОС, отслушиваем, наслаждаемся результатом
- монтируем динамик в корпус АС, подключаем к разъемам, устанавливаем через
герметизирующую прокладку на свое место заднюю стенку АС, настраиваем оптимальную
глубину ЭМОС, отслушиваем, наслаждаемся результатом ![]() .
Ну, и конечно, если интересно, не забываем произвести замеры.
.
Ну, и конечно, если интересно, не забываем произвести замеры.
5. Замеры
Начинаем, как всегда с частотных характеристик, уже микрофоном - зеленый график - сквозная АЧХ сабвуфера при регуляторе полосы пропускания в крайнем левом положении, желтый график (+ФЧХ) - та же АЧХ в крайнем правом положении регулятора полосы.
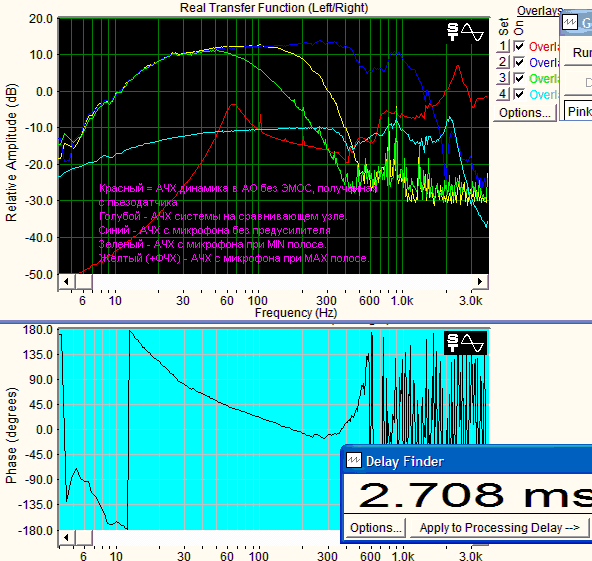
Рис.35
Программным пакетом ARTA можно посмотреть другие интересные характеристики - импульсную характеристику и график кумулятивного затухания спектра. Каких то особых аномалий не замечено.
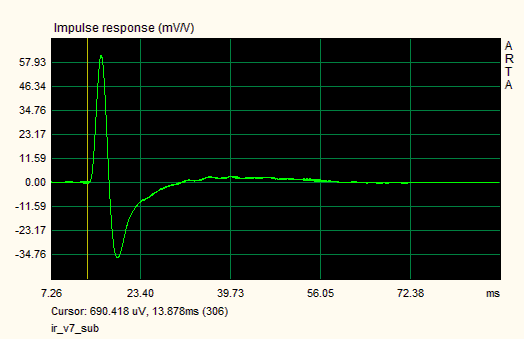
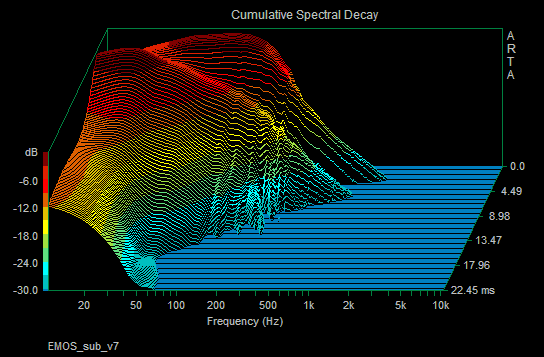
Рис.36
Поведение системы на нестационарном сигнале можно оценить по замерам с микрофона в ближней зоне сигнала типа ToneBurst с различными частотами НЧ-заполнения. Хорошо видно, как отрабатывается фронт и спад огибающей сигнала благодаря малому ГВЗ системы -
Рис.37
Итак, с поведением системы с ЭМОС в частотной и временной области мы познакомились. Теперь попробуем посмотреть, что же нам дает введение ЭМОС в плане снижения искажений. На следующей иллюстрации по замерам, произведенным с пьезодатчика, можно увидеть степень снижения искажений на разных частотах. То есть на каждой частоте производилось два замера - с включенной и отключенной ЭМОС. Амплитуда выходного сигнала (основная гармоника) в обоих случаях выравнивалась для сопоставимости измерений. Синий график - АЧХ системы, красный - спектр сигнала в системе без ЭМОС, желтый - спектр сигнала с задействованной ЭМОС.
Рис.38
Видно, что наибольшие искажения динамик имеет на
самых низких частотах и ЭМОС с честью ![]() исправляет ситуацию. На рисунке - верхняя табличка - значения THD сигнала
при выключенной ЭМОС, нижняя - с включенной.
исправляет ситуацию. На рисунке - верхняя табличка - значения THD сигнала
при выключенной ЭМОС, нижняя - с включенной.
На следующих графиках можно ознакомиться с замерами THD, произведенными
уже электретным микрофоном в ближней зоне. К сожалению, мне неизвестен THD
этого микрофона на НЧ, но, похоже, вклад его искажений в показания не такой
уж и маленький... А обычный электродинамический микрофон на таких частотах
практически не работает...
Рис.39
Достаточно длинный шлейф гармоник при подаче сигнала
25Гц обуславливается тем, что при большой экскурсии диффузора начинает в большей
степени сказываться влияние призвуков от воздуха, обтекающего звуковую катушку
(шум подвижки). Там, где амплитуда перемещений диффузора уменьшается, то есть
на более высоких частотах, этот шум уже практически не заметен.
Обобщая, можно сказать, что ЭМОС успешно решает задачи эффективного
расширения НЧ-диапазона и существенного снижения нелинейных искажений.
Теперь о субъективных отличиях звучания этой версии сабвуфера
от предыдущей, описанной в статье "Вниз по лестнице, ведущей вверх...".
Бас получился более глубоким, более собранным, при больших уровнях сигнала
работа лимитера практически не заметна, переходные процессы в системе при
воспроизведении музыки не вызывают видимых на глаз ненужных перемещений диффузора
динамика, улучшилось его демпфирование. Как-то так ![]()
6. Послесловие
После написания первой статьи многие спрашивали
- почему в ЭМОС применены такие плохие динамики ![]() .
С тех пор было собрано несколько ЭМОС-систем на разных динамиках, включая
пару 12" под одну стереосистему. Качественного отличия звучания (исключая
максимальную громкость) отмечено не было. Да, добавляется масштабность звука,
его основательность, да, можно заставить воздух "загустеть", добавив
громкость
.
С тех пор было собрано несколько ЭМОС-систем на разных динамиках, включая
пару 12" под одну стереосистему. Качественного отличия звучания (исключая
максимальную громкость) отмечено не было. Да, добавляется масштабность звука,
его основательность, да, можно заставить воздух "загустеть", добавив
громкость ![]() . Но, основные
качества - отсутствие локализации саба, артикулированность, микро- и макродинамика,
и, просто, говоря словами одного из форумчан, "потрясающе красивый бас"
проявляются уже с 8" и 10" динамиками. И бас действительно такой,-
когда надо - мягко-задушевно-проникновенный, когда надо - жестко бьет по грудной
клетке, и всё это ощущается без особого форсирования громкости. Как говорится
- хороший сабвуфер замечаешь только тогда, когда его выключаешь. И это - правда.
Конечно, никто не запрещает брать хорошие динамики, качество звучания сабвуфера
от этого только повысится. Все еще впереди
. Но, основные
качества - отсутствие локализации саба, артикулированность, микро- и макродинамика,
и, просто, говоря словами одного из форумчан, "потрясающе красивый бас"
проявляются уже с 8" и 10" динамиками. И бас действительно такой,-
когда надо - мягко-задушевно-проникновенный, когда надо - жестко бьет по грудной
клетке, и всё это ощущается без особого форсирования громкости. Как говорится
- хороший сабвуфер замечаешь только тогда, когда его выключаешь. И это - правда.
Конечно, никто не запрещает брать хорошие динамики, качество звучания сабвуфера
от этого только повысится. Все еще впереди ![]() Дорогу осилит идущий. Так что, желаю и вам пройти вниз по лестнице, ведущей
вверх...
Дорогу осилит идущий. Так что, желаю и вам пройти вниз по лестнице, ведущей
вверх...
Обсуждение этой темы долго проходило на форуме Vegalab'a
![]()