Сколько дерева и выдумки было потрачено на акустику для получения из нее
басов! А сколько эпитетов было придумано для его описания! И "вялый",
и "собранный", и "артикулированный", и "размазанный",
и "отстающий", и "быстрый", и "медленный", и
"упругий", и "бубнящий", и "четкий", и "затянутый",
и "выразительный", и "бумбоксовый", и "долбящий",
и "благородный", и.... Можно еще долго перечислять, а можно просто
сказать - "правильный" и "неправильный". Причем без толики
субъективизма. Разумное применение возможностей электроники для преодоления
ограничений электроакустики в рамках активных АС позволяет сделать бас более
"правильным" ![]() .
И тут уж Вам решать, что Вы хотите от такой акустики - приемлимого (почти
"правильного") баса в ограниченных габаритах, или "правильного"
баса в акустике классических размеров. Что такое "правильный" бас,
и как к нему приблизиться с помощью ЭМОС, и рассмотрено в этой статье.
.
И тут уж Вам решать, что Вы хотите от такой акустики - приемлимого (почти
"правильного") баса в ограниченных габаритах, или "правильного"
баса в акустике классических размеров. Что такое "правильный" бас,
и как к нему приблизиться с помощью ЭМОС, и рассмотрено в этой статье.
Изложенное ниже не претендует на истину в последней инстанции, просто это мой взгляд на проблему воспроизведения звука в НЧ диапазоне.
Казалось бы, что для полноценного воспроизведения музыки в низкочастотном диапазоне, акустике достаточно воспроизвести самые низкие ноты, которые могут быть сыграны музыкальными инструментами (примерно 30 Гц) и все, что находится ниже по частоте можно смело отбросить. Но есть большое НО… Рассмотрим спектр музыкального произведения с высоким содержанием НЧ-составляющих.
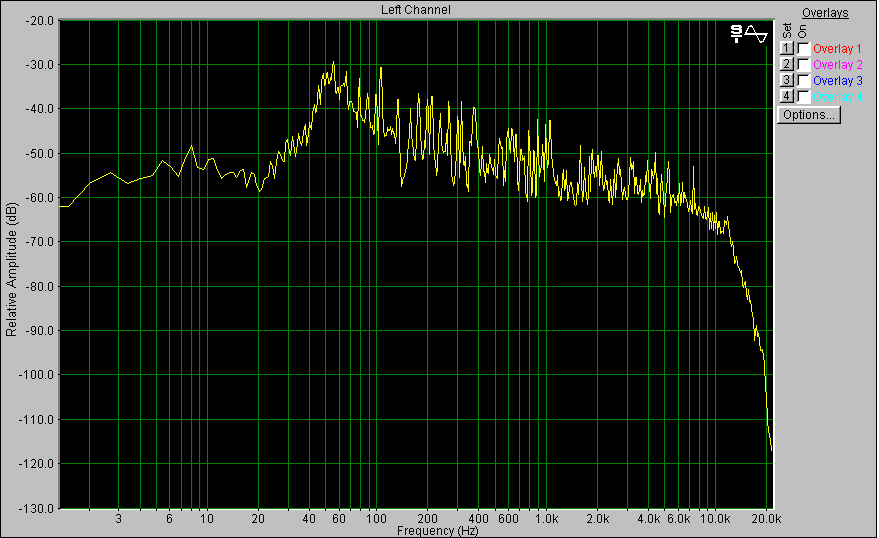
Из него видно, что основная энергия спектра действительно резко возрастает, начиная с 40…50Гц. Ниже этих частот также что-то имеется, но децибелл на 15-20 ниже максимального уровня. Попробуем разобраться, что это и что с этим делать – выбросить (отрезать) или, несмотря ни на что, постараться воспроизвести.
Для простоты давайте сначала рассмотрим спектр тестового сигнала типа Tone Burst, легко генерируемый тем же Спектралабом. Зададим его параметры – частота – 50Гц, длительность тоновой посылки – 100мС, период повторения – 200мС.
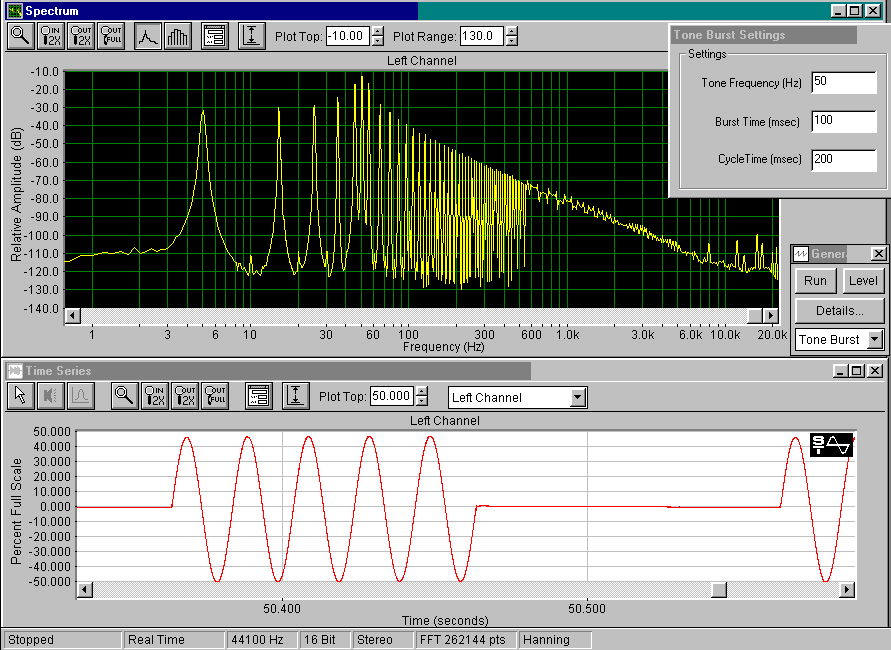
Знакомая картина! Максимальная по амплитуде гармоника – 50Гц, а вокруг нее масса других гармоник, как вверх по частоте, так и вниз. Причем некоторые гармоники попали в инфранизкочастотную (ИНЧ) область. После недолгого размышления приходим к выводу, что гармоники, лежащие ВЫШЕ 50Гц, формируют резкий излом осциллограммы в начале тоновой посылки и в ее конце. Гармоники, лежащие ниже 50Гц – определяют вид ОГИБАЮЩЕЙ тоновой посылки – в нашем случае – это прямоугольник.
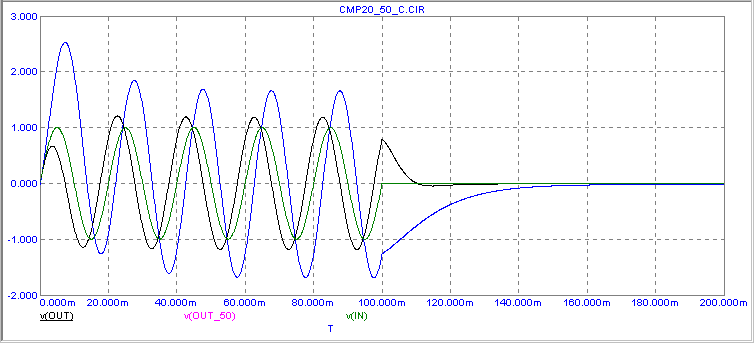
Посмотрим, что получится при прохождении такой тоновой посылки через ФВЧ 2-го порядка с частотой среза 50Гц и 20Гц. Ясно, что в первом случае субгармоники уменьшатся по амплитуде в большей степени, а как изменилась огибающая видно из графиков.
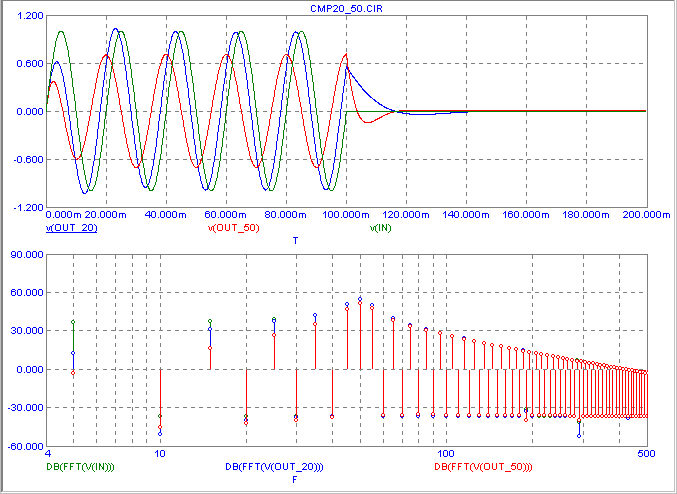
На нем зеленым обозначено все, что относится ко входному сигналу
(Tone Burst), красным и синим – на выходе ФВЧ с частотой среза 50Гц и 20Гц,
соответственно. Видно, какими «вялыми», "затянутыми" стали передний
и задний фронты сигнала Tone Burst при срезе на 50Гц. ![]() Понятие «фронт» в данном контексте не относится к скорости нарастания выходного
напряжения усилителя мощности – речь идет о форме ОГИБАЮЩЕЙ. Можно назвать
это «атакой» или как-нибудь еще…
Понятие «фронт» в данном контексте не относится к скорости нарастания выходного
напряжения усилителя мощности – речь идет о форме ОГИБАЮЩЕЙ. Можно назвать
это «атакой» или как-нибудь еще…
Поскольку расширение частотного диапазона вниз будет происходить за счет коррекции АЧХ усилительного тракта, посмотрим, во что это выльется. Так как в акустическом оформлении типа закрытый ящик (ЗЯ) ниже частоты среза спад акустического давления происходит с крутизной 12Дб/окт. требуется корректор 2-го порядка (с подъемом АЧХ 12Дб/окт.), что-то вроде корректора Линквитца. Для расширения частотного диапазона вниз по частоте с 50 до 20Гц (по –3Дб) суммарный подъем АЧХ составит 16Дб. Диаграммы входного (зеленый график) и выходного напряжения усилителя (синий график), а также результирующего акустического давления (черный график – SPL) на выходе АС наглядно показывают как приходится напрягаться динамику, чтобы обеспечить требуемый частотный диапазон на нестационарном сигнале.
Передачу фронта (атаку) огибающей, можно улучшать и дальше коррекцией АЧХ, но здесь мы вступаем в область компромиссов…(мощность УМ, максимальное объемное смещение, динамический диапазон, нелинейные искажения и т.д…)
Вот что произойдет, если мы попытаемся при тех же исходных условиях расширить АЧХ до 16Гц (по –3Дб):
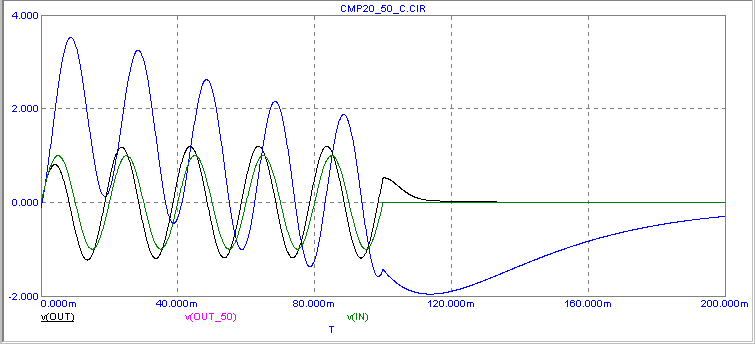
При этом SPL, конечно, будет ближе по форме к исходной, но какой ценой! И учтите при этом, что удвоение напряжения на выходе усилителя приводит к учетверению мгновенной мощности…
Введение заранее известной НЧ-коррекции в электронный тракт
широко известно благодаря LINKWITZ LAB и относится к детерминистическим
(предопределенным) способам настройки АС. То есть перед расчетом параметров
корректирующей цепи необходимо знать все параметры каждой конкретной будущей
АС и быть уверенным, что они не изменятся в процессе эксплуатации. Иначе -
неизбежное искажение АЧХ - повышенная неравномерность в рабочей области частот.
Необходимость подавать значительную мощность на головку во время работы приводит
к параметрическому динамическому изменению механических и электрических параметров
динамической головки, как то,- смещение резонансной частоты, изменение добротности
за счет температурных процессов в катушке, тепловая интермодуляция, повышенные
нелинейные искажения за счет нелинейности подвеса, диффузородержателя, краевой
неравномерности магнитного поля в зазоре. Перечисленные отрицательные моменты
можно уменьшить выбором более мощной, качественной, а значит и более дорогой
динамической головки. Немного скрашивает этот момент то, что в НЧ-области
частот пороги заметности искажений достаточно велики, а амплитудно-частотные
искажения АС меньше амплитудно-частотных искажений, вносимых комнатой для
прослушивания ![]() .
.
Другим способом, позволяющим эффективно решать проблемы расширения частотного
диапазона и повышения качества звучания, является ЭМОС – электромеханическая
обратная связь. Основная идея этого способа - включить такой критический элемент,
как динамическая головка - основной источник частотных и нелинейных искажений,
в цепь отрицательной обратной связи активной АС. Для этого необходим датчик
(преобразователь физической величины в электрическую), каким-то образом подключенный
к "выходу" динамической головки. Что это даст? Управление непосредственно
одним из динамических параметров движущегося диффузора (линейным смещением,
скоростью, ускорением) посредством ЭМОС позволяет формировать требуемый ход
АЧХ в НЧ и ИНЧ области одновременно со снижением нелинейных искажений. Также
значительно снижается влияние динамических изменений параметров ДГ в процессе
работы, происходит улучшение наиболее существенных параметров АС. Степень
улучшения зависит от глубины получившейся ЭМОС (смотри теорию систем с ООС)
и, в том числе, в нашем случае, качества используемого датчика. Подходящий
для ЭМОС вид акустического оформления – это ЗЯ: единственная излучающая поверхность
(диффузор), перемещающаяся с контролируемым параметром движения и создает
требуемую АЧХ. В случае управления ускорением движения диффузора мы получим
SPL, пропорциональный входному сигналу, при управлении скоростью – потребуется
предварительная коррекция (подъем) НЧ сигнала в 6Дб/окт, при управлении смещением
– коррекция на НЧ составит 12Дб/окт. Здесь не предполагается рассматривать
достоинства и недостатки того или иного способа организации ЭМОС. Конкретно
будет рассмотрен вариант ЭМОС с пьезодатчиком ускорения, закрепленном на диффузоре
динамика.
Как уже было сказано, качество системы с ЭМОС сильно зависит от параметров
датчика. Одна из конструкций, получившаяся в результате долгого эволюционного
![]() пути , и будет рассмотрена.
пути , и будет рассмотрена.
Попробуем сформулировать требования к конструкции датчика ускорения.
Первое, и основное,– он должен измерять именно ускорение, в чистом виде, без
добавок от скорости (скоростного воздушного напора), положения (величины индукции
магнитного поля от магнитной системы, степени деформации диффузора), электрических
наводок и пр. Второе – датчик должен иметь минимальный вес, иначе за счет
увеличения массы подвижной части динамика упадет его чувствительность. Третье
– датчик должен иметь максимальную жесткость, так как это влияет на его частотные
свойства (АЧХ и ФЧХ), в том числе и на собственную частоту резонанса конструкции
датчика. Точки закрепления датчика на диффузоре должны быть как можно ближе
к звуковой катушке, чтобы уменьшить задержку распространения сигнала. Конструкция
не должна иметь резко выраженных резонансов, обеспечивать экранировку чувствительного
элемента, как электрическую, так и магнитную, обеспечивать его нечувствительность
к деформациям диффузора. Предложенная конструкция, рассчитанная на изготовление
в домашних условиях, в основном, соответствует этим условиям. Все эти требования
не родились на пустом месте, был пройден определенный эволюционный ряд проб
и ошибок, с частью из которых (и проб и ошибок ![]() )
можно ознакомиться на следующей иллюстрации (отработка шла на 75ГДН1-4 с диаметром
керна 50 мм) -
)
можно ознакомиться на следующей иллюстрации (отработка шла на 75ГДН1-4 с диаметром
керна 50 мм) -

В качестве чувствительного элемента выбран дисковый пьезоэлемент, который
можно добыть, например, из пьезоизлучателя HPA22D 22мм, (14.00 руб по прайсу
«Платана») или чего-то подобного (не ограничиваю вашу фантазию). Предостерегаю
от использования пьезоэлемента на стальной пластине (на фото слева) – могут
быть неожиданные ![]() эффекты
при работе такого датчика в мощном неоднородном поле постоянного магнита динамика.
Тут и магнитная экранировка не поможет. Просто, в выходном сигнале датчика
появляется компонента, зависящая от положения (позиции) датчика, и в нашем
случае получается, что это - ПОС, и от ее глубины зависит характер поведения
диффузора на ИНЧ (в том числе и пресловутая избыточная "болтанка"
диффузора на ИНЧ). Однако, вернемся к нашим "баранам"
эффекты
при работе такого датчика в мощном неоднородном поле постоянного магнита динамика.
Тут и магнитная экранировка не поможет. Просто, в выходном сигнале датчика
появляется компонента, зависящая от положения (позиции) датчика, и в нашем
случае получается, что это - ПОС, и от ее глубины зависит характер поведения
диффузора на ИНЧ (в том числе и пресловутая избыточная "болтанка"
диффузора на ИНЧ). Однако, вернемся к нашим "баранам" ![]() -
-

В качестве подопытного динамика при написании статьи, был выбран 10ГД30Е с диаметром керна магнита – 40мм. Аналогичную конструкцию имеет 25ГД26Б. Изготовление датчика начинается с чертежа. Исходя из диаметра керна и диаметра имеющейся пластинки пьезодатчика рисуем собственную конструкцию:
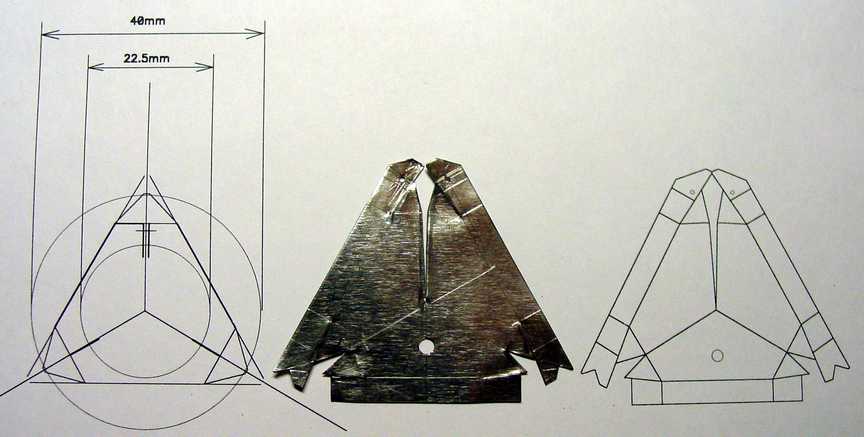
По ней, по образу и подобию, вычерчиваем выкройку путем несложных
![]() геометрических построений
или берем здесь (в формате PCAD4.5), если размеры
совпадают.
геометрических построений
или берем здесь (в формате PCAD4.5), если размеры
совпадают.
Далее берем тонкую белую жесть (например, от банки из-под кофе)
и размечаем будущую заготовку в соответствие с выкройкой. Если выкройка вычерчивалась
в каком либо CAD'е – можно воспользоваться лазерно-утюжной ![]() технологией для переноса рисунка на жесть. Вырезаем, как на фото, слегка выправляем
неровности. Небольшими плоскогубцами сгибаем заготовку, подгоняем размеры
точнее по месту посадки пьезодиска.
технологией для переноса рисунка на жесть. Вырезаем, как на фото, слегка выправляем
неровности. Небольшими плоскогубцами сгибаем заготовку, подгоняем размеры
точнее по месту посадки пьезодиска.

Верхняя крышка должна получиться слегка выпуклой с целью повышения ее жесткости. Пропаиваем швы. Окончательно подгоняем посадочные места для пьезодиска остро отточенным скальпелем. Для сборки нам еще понадобятся пружинка (от "битой" дискеты 3.5) и пружинные ламели контактов переключателя типа П2К (3 штуки). Устанавливаем пружинку (от дискеты) на место по фото (ось пропаивается, длинные концы пружинки пока не обкусываем, иначе тяжело будет устанавливать пьезодиск). Ширина паза для установки пружинки по месту должна быть не менее 1мм.
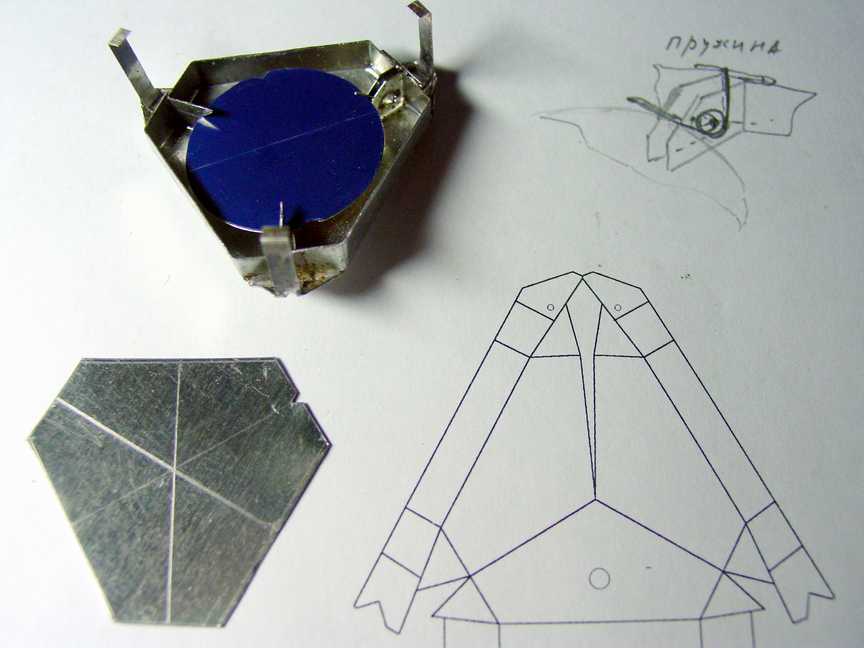
Как видно из фото, крепление пьезодиска в держателе обеспечивается за торцы посадочными гнездами типа «ласточкин хвост», причем две точки крепления неподвижны, а третья получается за счет прижатия диска пружинкой к двум скошенным ребрам. Распрямиться пружинке не дает упор, припаянный к корпусу. Такой безлюфтовый способ крепления не передает паразитные усилия от возможной деформации корпуса при работе на датчик. Припаиваем стоечки из ламелей П2К как на фото. Гибкость стоек способствует механической развязке конструкции датчика от деформаций диффузора. К серебряной обкладке пьезодиска припаиваем тонкий (~0,05мм) вывод из медной проволоки и покрываем обкладку лаком, чтобы не окислялась. Паяем быстро, не перегревая обкладку, иначе серебро начнет растворяться в припое. На обратную сторону пьезопластинки наклеиваем пару слоев тонкой импортной изоленты, чтобы подавить добротность ее собственного резонанса. Устанавливаем в держатели корпуса датчика, оттянув пружинку. При этом электрический вывод должен попасть в отверстие в корпусе. Если диск стоит ровно (а скальпель на что?), лишние концы пружинки можно откусить. Припаиваем нижнюю крышку, по периметру. Также приклеиваем демпфирующую изоленту, как показано на фото:

Готовый датчик в сборе изображен на следующем фото:
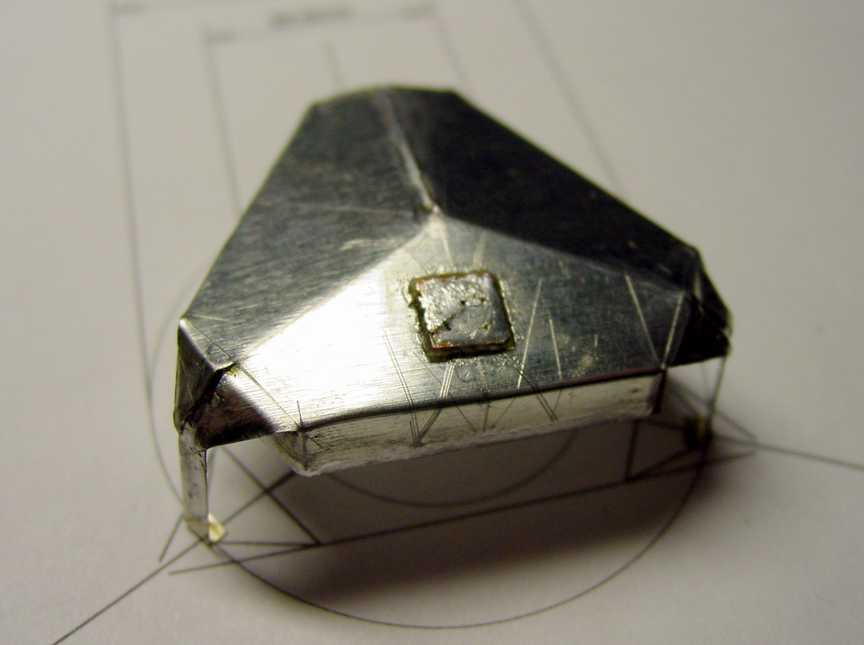
На ней видно изолированную контактную площадку, приклеенную к
корпусу. Это кусочек тонкого (получается расщеплением вдоль) фольгированного
стеклотекстолита с отверстием в центре. Электрический вывод с датчика припаян
к ней, без натяга, с небольшим изгибчиком внутри, вроде поросячьего хвостика
![]() .
.
Дальнейшие действия придется проделывать над диффузором динамика. Предельно осторожно и внимательно! Предварительно с него надо удалить центральный пылезащитный колпачок, растворив клей по его краю, или каким-то другим подходящим способом. Для крепления нашего датчика к диффузору надо изготовить 3 монтажных площадочки из той же жести и укрепить их на диффузоре как можно ближе к звуковой катушке по воображаемым углам равностороннего треугольника (чтобы не пришлось потом переделывать, заранее маркируем эти места), протыкая стенки диффузора «рожками», и загибая их с обратной стороны:

После этого надо тщательно проклеить точки крепления «суперклеем».
На время работы внутрь звуковой катушки лучше поместить вату, чтобы потом
не пришлось из магнитного зазора вытаскивать мусор ![]() .
.
На следующем фото показана установка (и ориентация) готового
датчика (опять пайкой в 3-х местах). Если где-то клей отошел из-за воздействия
температуры – надо не забыть подклеить. Чем хороша здесь пайка - во-первых,
- прочность, во-вторых, всегда есть возможность демонтажа датчика, для проведения
какой-либо доработки или деинсталляции ![]() ...
...

На двух следующих фото показана подпайка коаксиала к датчику
и его выход с диффузора на корпус динамика. Фиксация кабеля произведена термоклеем.
Желательно использовать тонкий изолированный коаксиальный кабель с тонкой
центральной моножилой. Пока что случаев перетирания или обрыва такого кабеля
при работе - не зафиксировано ![]() .
.


Тестером убеждаемся в отсутствии замыканий, лишний раз (не повредит) проверяем отсутствии мусора в магнитном зазоре, потом приклеиваем центральный колпачек обратно к диффузору. Те, кто сомневается в качестве получившегося датчика, могут повременить с приклейкой колпачка, пока не опробуют его в работе. Кажется все.
Все сказанное - не догма, никто не препятствует вам разработать свою собственную конструкцию датчика. Это абсолютно нормально.
Давайте более плотно познакомимся с динамиком, как объектом регулирования. Начнем это знакомство с изучения импедансной кривой. Без акустического оформления, она выглядит так –
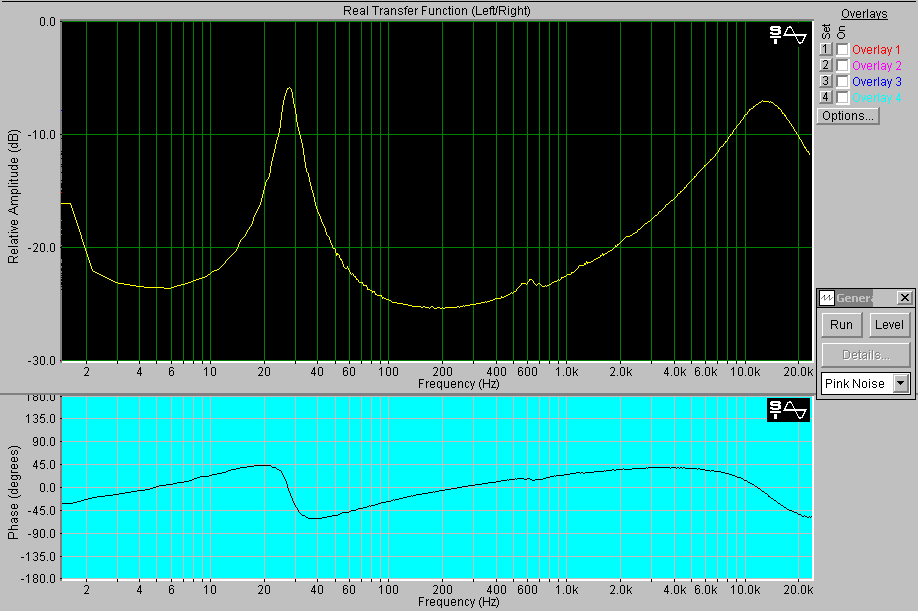
На частоте механического резонанса 28Гц имеем значительный подъем импеданса, выше по частоте расположена область поршневого диапазона, который заканчивается на частоте 550-600Гц (видим рябь на кривой – к звуковой катушке вернулись отразившиеся от подвеса диффузора колебания деформации). Еще выше по частоте начинается плавный рост импеданса, обусловленный индуктивной компонентой импеданса звуковой катушки.
Поместим головку в ЗЯ (у меня – это тестовый бокс, объемом 13 литров) и опять замерим его импеданс –
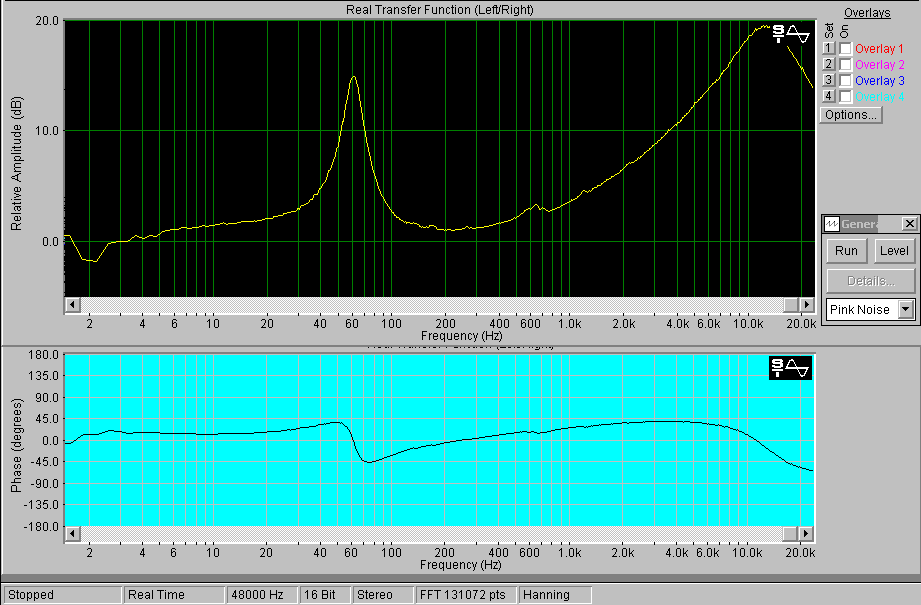
Получили сдвиг резонансного максимума до частоты 61Гц; поршневой диапазон, естественно, не изменился, но добавилась некоторая неравномерность, связанная с резонансами корпуса на частотах 130, 160, 260Гц. Пички на 1200, 2300Гц связаны с резонансными явлениями в самом диффузоре и приблизительно кратны верхней частоте поршневого диапазона.
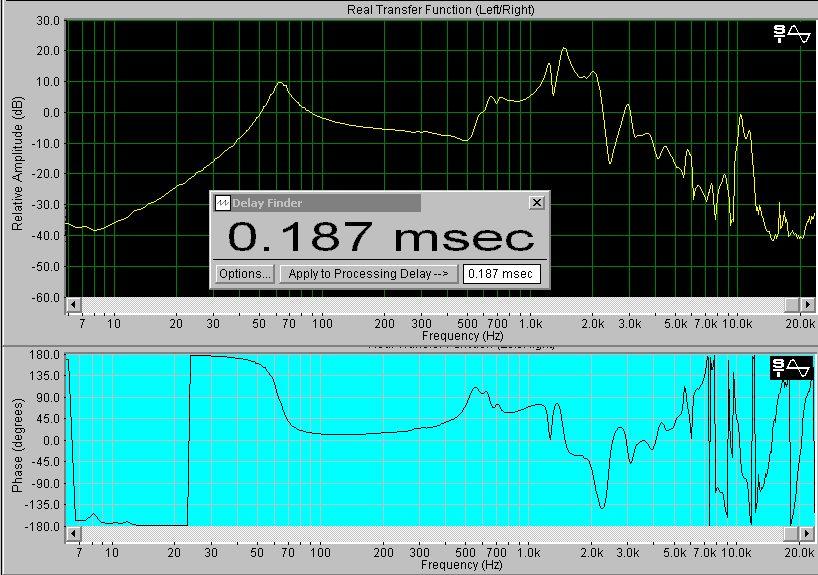
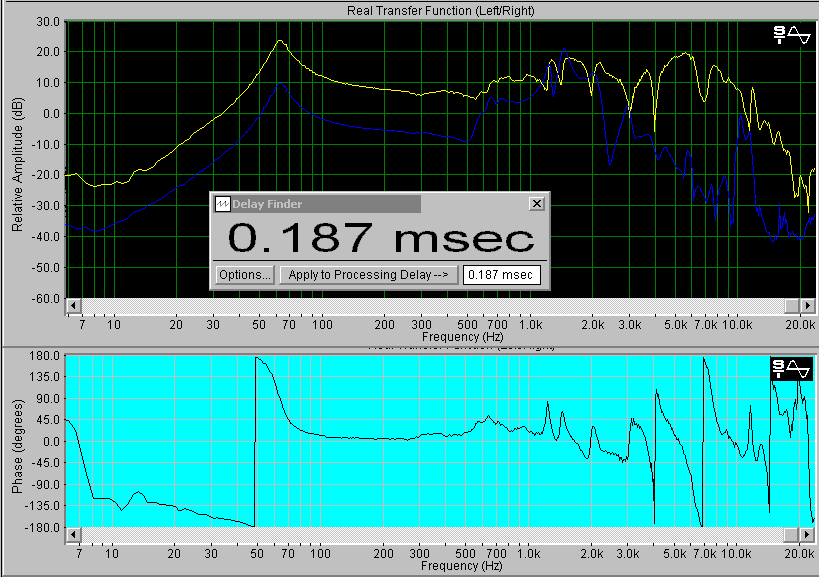
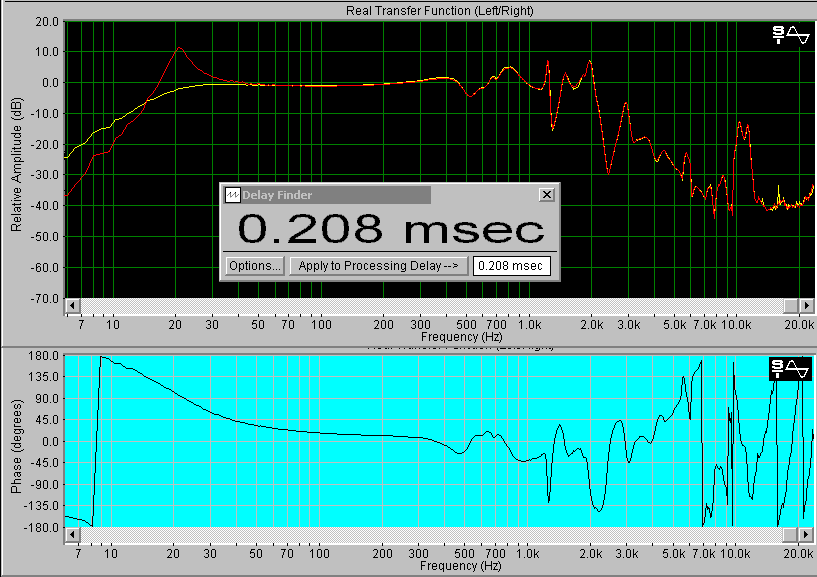
Теперь интересно посмотреть, как же выглядит сигнал с датчика –
Примечание: на всех графиках ФЧХ относится к графику АЧХ желтого цвета.
Поскольку пьезодатчик высокоомный, емкостного типа, необходим буферный каскад с высокоомным входом – будем использовать повторитель на ОУ с полевым входом. Величина входного сопротивления каскада определяет нижнюю граничную рабочую частоту датчика. В нашем случае, при емкости датчика равной 13,4 нанофарад и входном сопротивлении в 10 МегаОм она получается равной 1,19Гц, что очень хорошо.
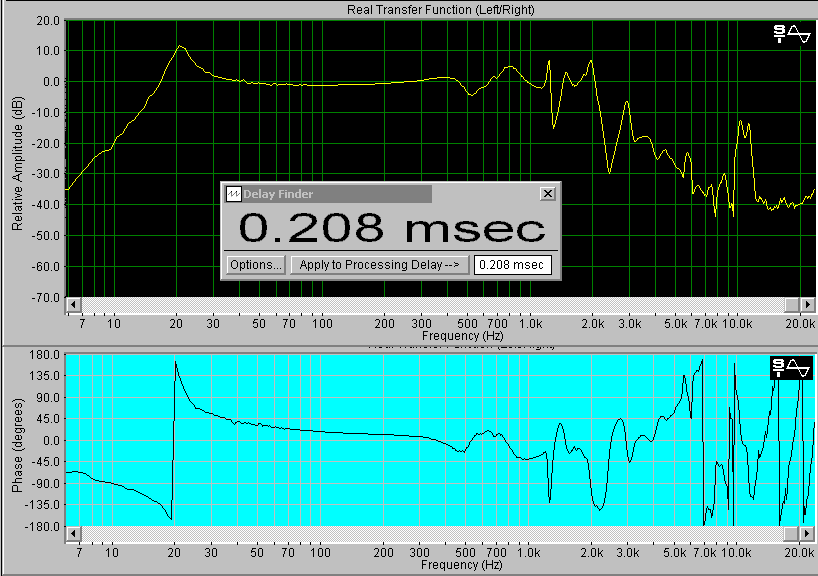
На графике видны АЧХ и ФЧХ сигнала ускорения с пьезодатчика при запитке головки усилителем типа ИТУН (с высоким выходным сопротивлением). Стало четко видно, где заканчивается поршневой диапазон, на частоте 1500Гц получился основной резонанс конструкции датчика, на частотах 5600 и 11000Гц – резонансные явления в самой пластинке пьезодатчика. Задержка сигнала с датчика, за счет конечной скорости распространения звука в конструкционных материалах, составила 0,187 миллисекунд. Видим, что в предполагаемом диапазоне рабочих частот, фаза сигнала с датчика изменяется от +180 градусов до, примерно, +10 градусов. Вне поршневого диапазона фаза ведет себя труднопредсказуемо.
Интересно узнать получившуюся чувствительность датчика. Подаем на головку 50Гц, измеряем при этом смещение диффузора и выходное напряжение с датчика. В моем случае цифры следующие: при двойной амплитуде смещения равной 5мм получили сигнал на выходе датчика 0,88В эффективного значения (1,24В амплитудного). Известны формулы для вычисления колебательной скорости и ускорения: V=2*Pi*F*S и A=(2*Pi*F)^2*S, где S - амплитудное значение смещения колеблющейся точки, F - частота колебаний, V - скорость, A - ускорение. При таком смещении на этой частоте имеем максимальную колебательную скорость 0,785 м/сек и ускорение 246,7 м/сек^2 (25G). Тогда чувствительность нашего датчика получается 5,04мВ/м/сек^2. При такой чувствительности датчика не должно быть проблем с реализацией необходимого динамического диапазона системы.
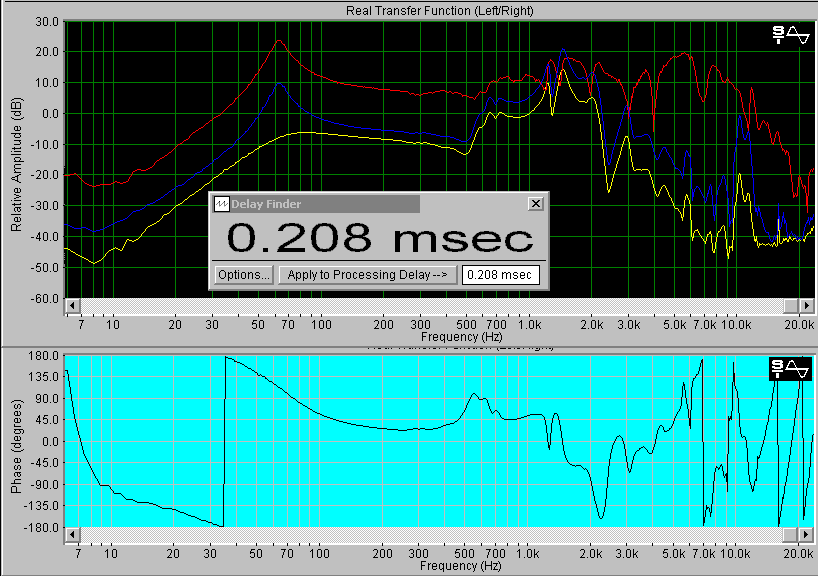
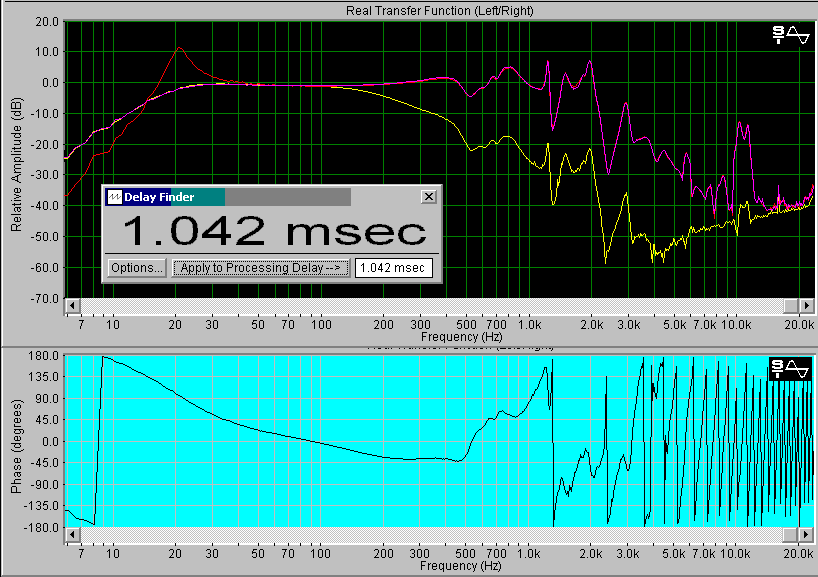
Сравним АЧХ, полученную с датчика ускорения (синий график) с сигналом, полученным с электретного микрофона (желтый график) в ближней зоне (10мм) АС –
Видно, что в поршневом диапазоне АЧХ, полученная с микрофона, практически совпадает с АЧХ с датчика ускорения. Отсутствие подъема АЧХ в диапазоне 1- 2КГц подтверждает наш вывод о принадлежности этого резонанса датчику ускорения, точнее его конструкции...
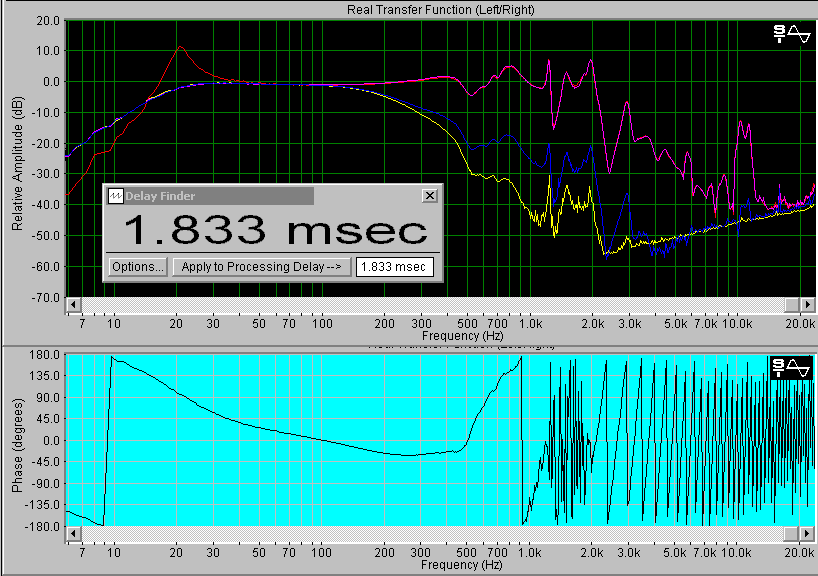
Проведем аналогичные измерения с усилителем типа ИНУН (с низким выходным сопротивлением). Видим аналогичный горб АЧХ (желтый график) в зоне 1-2КГц (выше по частоте нас мало волнует) –
К тому же исчез основной резонанс на НЧ за счет электрического демпфирования низким выходным сопротивлением усилителя. Но теперь фаза на НЧ изменяется в диапазоне от +270 до +20Градусов, что может создать дополнительные трудности с устойчивостью системы при введении ЭМОС. Задержка сигнала с датчика также несколько возросла из-за иного хода АЧХ выше 1 КГц, по сравнению с ИТУНом.
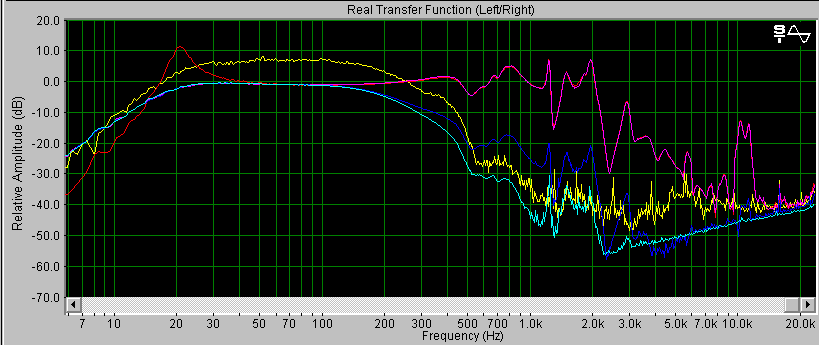
Для полноты картины можно рассмотреть поведение АЧХ на ИНУН при измерении микрофоном в ближней зоне (желтый график) –
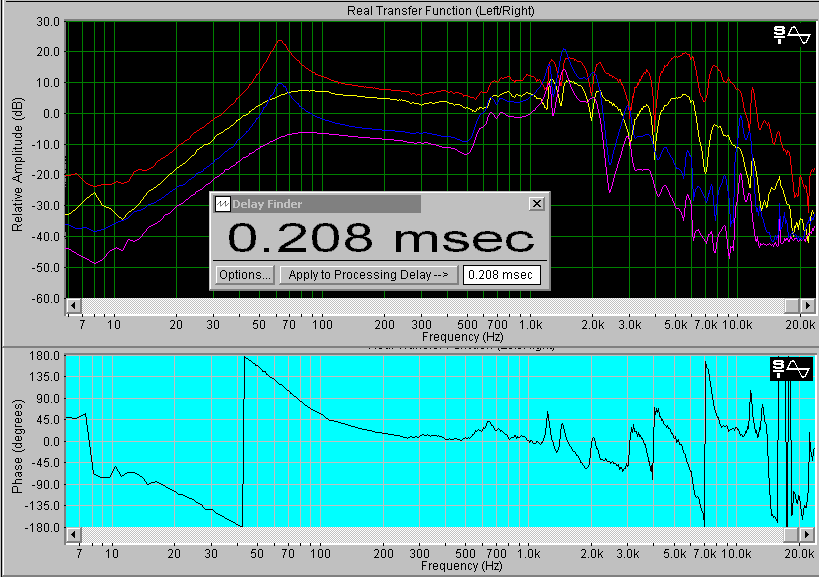
Комментировать особенно нечего. Все предсказуемо. Можно было и не мерять...
Выводы: ЭМОС, в принципе может реализовать только в поршневом диапазоне работы ДГ. Необходима существенная коррекция петлевого АЧХ, чтобы обеспечить устойчивость системы с ЭМОС. Что-то надо делать с резонансом датчика ускорения. ИТУН как усилитель мощности предпочтительнее ИНУН, поскольку вращение фазы сигнала ускорения с датчика в полосе рабочих частот меньше, а резонансный горб легко выравнивается с помощью ЭМОС, к тому же увеличивая глубину ОС на этой частоте и повышая общий КПД системы. Параметры датчика удовлетворяют требованиям, необходимым для высококачественного воспроизведения звука.
Для конкретности, рассмотрим применение ЭМОС в сабвуфере. На рисунке представлена его функциональная схема
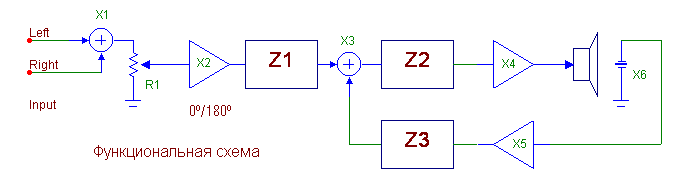
На входе сигналы левого и правого канала суммируются и после регулятора уровня поступают в усилитель/переключатель фазы, а далее в корректор Z1, который нужен для регулировки верхней полосы пропускания сабвуфера, позволяющей согласовать его совместную работу с остальной акустикой. Элементы X3, Z2, X4, X6, X5, Z3 образуют петлю ЭМОС. Фильтр Z2 производит основную коррекцию в петле ЭМОС, необходимую для обеспечения устойчивости всей системы. Рассмотрим его схему -
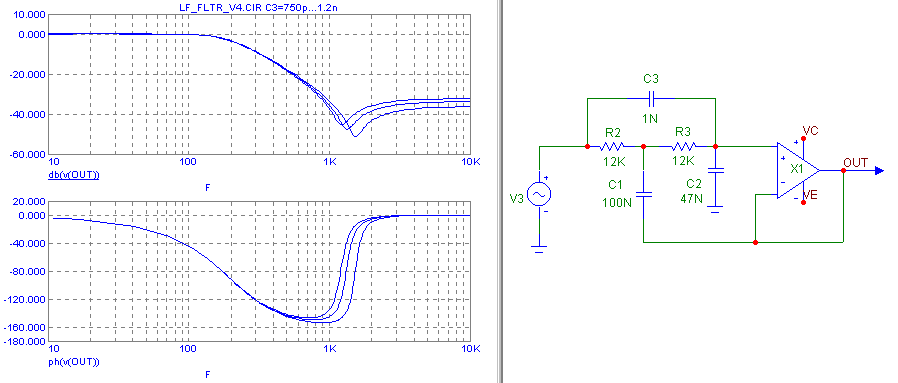
Добавление конденсатора С1 в схему ФНЧ 2-го порядка придает ей интересные свойства – на передаточной характеристике фильтра появляется ноль. Выбирая частоту режекции (изменением С3) равной частоте резонанса конструкции датчика ускорения, мы убиваем двух зайцев – формируем требумый ход АЧХ корректора и нивелируем нежелательное влияние резонанса датчика, препятствуещее получению достаточной глубины ЭМОС. Фазовая характеристика такого фильтра, ИМХО, также должна способствовать повышению устойчивости системы.
Устойчивость системы с ЭМОС на ИНЧ повышается с помощью корректирующего звена Z3.
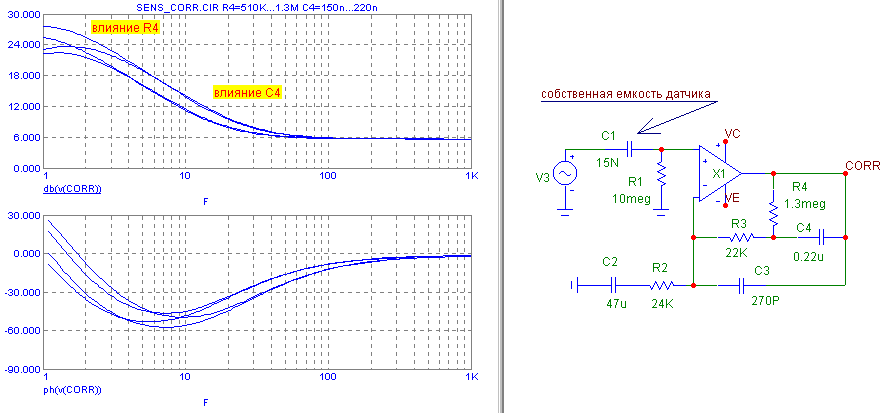
В цепи ОС включено дифференцирующее звено C4R3, что превращает этот корректор в неидеальный интегратор. При этом сигнал с датчика ускорения на ИНЧ после интегрирования превращается в сигнал, пропорциональный скорости, а это способствует повышению устойчивости ЭМОС на ИНЧ благодаря увеличению запаса по фазе в петле ЭМОС на этих частотах, а также одновременно с этим формирует требуемый ход сквозной АЧХ системы.
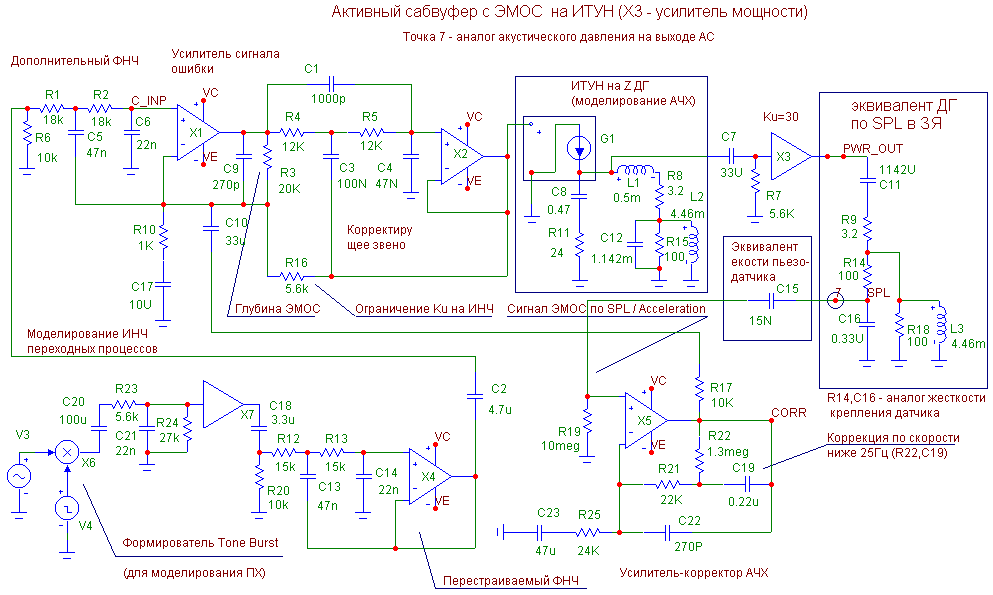
Принципиальная схема устройства обработки входного сигнала и цепей коррекции ЭМОС приведены ниже –
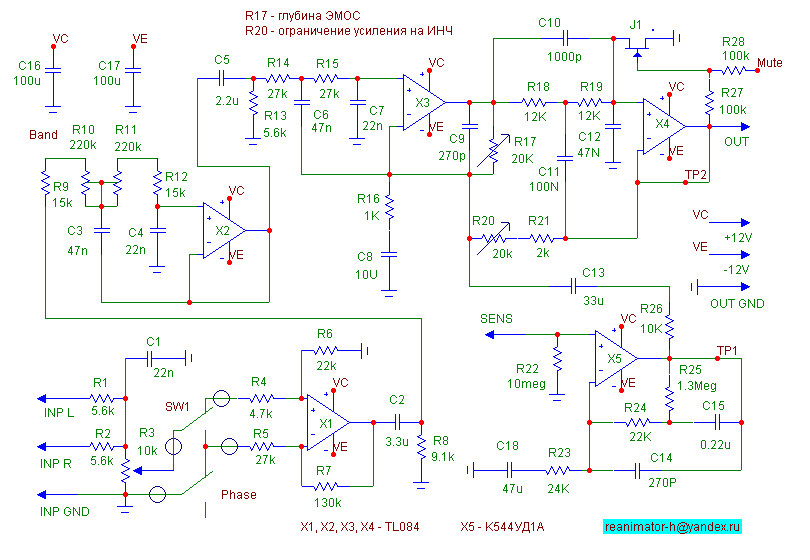
На ОУ Х1 выполнен усилитель/переключатель фазы входного сигнала. Номиналы резисторов R4, R5, R6, R7 рассчитаны так, чтобы входное сопротивление каскада оставалось неизменным при переключении SW1. На ОУ Х2 выполнен перестраиваемый ФНЧ (это Z1), на Х3 собран дополнительный неперестраиваемый ФНЧ и усилитель сигнала рассогласования цепи ЭМОС. Подстройка резистора R17 позволяет задать необходимую глубину ЭМОС не изменяя общей чувствительности схемы по входу. На Х4 выполнен основной корректор АЧХ ЭМОС (это Z2), резистор R20 позволяет ограничить максимальное усиление на ИНЧ. На ОУ Х5 выполнен усилитель/корректор сигнала с пьезодатчика (это Z3). Полевой транзистор J1 необходим для устранения переходных процессов при включении сабвуфера, и не только...
Усилитель мощности выполнен по схеме ИТУН, при использовании динамика с сопротивлением 4 Ом можно использовать традиционное включение микросхемы TDA2050, при сопротивлении 8 Ом – мостовое (с перекрестно-симметричными обратными связями).
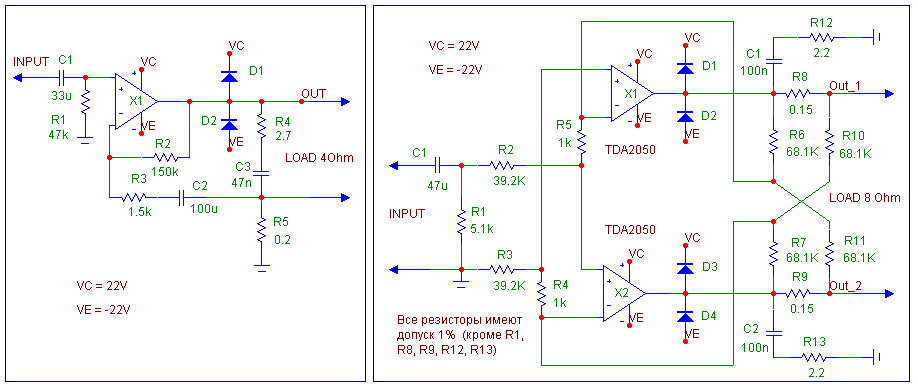
Зачем нужен такой запас по мощности для 10/25-ваттных НЧ-головок, надеюсь, вопросов не вызовет. Кроме того, для предотвращения клиппинга, применен лимитер/компрессор, совмещенный со схемой софт-старта –
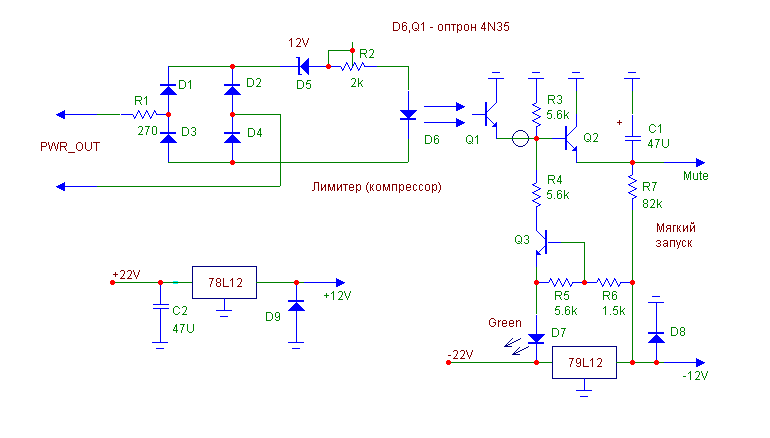
При включении питания, падения напряжения на стабилизаторе 79L12 недостаточно для открывания транзистора Q3, и конденсатор C1 остается в разряженном состоянии, поддерживаемом открытым транзистором Q2. По достижении напряжением питания номинального значения, открывается Q3 и запирает транзистор Q2. Через резистор R7 начинается заряд конденсатора C1 (сигнал "Mute"). При выключении питания, с началом спада питающего напряжения, аналогично запирается Q3 и открывает Q2, который быстро разряжает C1. Софт-старт через вход «Mute» снижает петлевое усиление в момент включения/выключения сабвуфера, а также при превышении выходным напряжением усилителя определенного порога (с постоянной времени ~20 мсек, выбранной из соображений минимальной заметности процесса регулирования для слуха). Для импеданса нагрузки 8 Ом надо повысить напряжение пробоя стабилитрона с 12V до 24V.
Любители MC7 могут могут познакомиться со схемотехникой поближе на модели или скачать ее здесь:
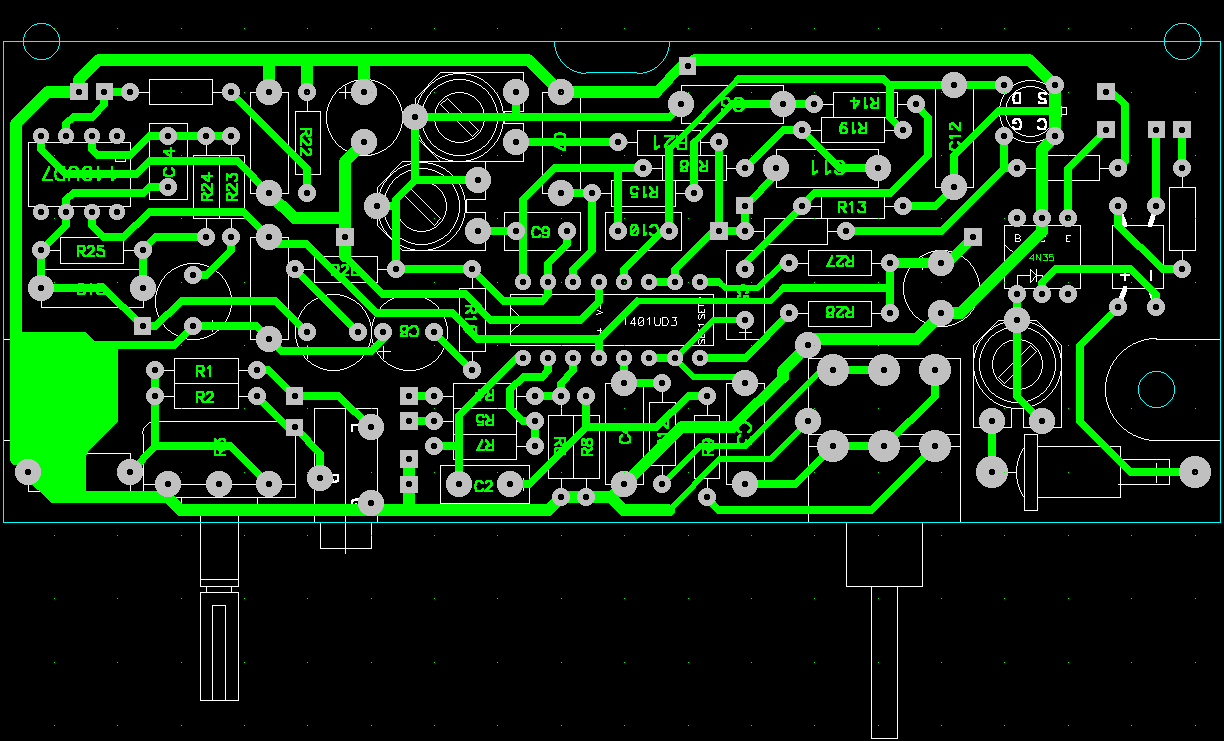
Реализованный (для компьютерной акустики 2.1) вариант печатной платы схемы управления также доступен (и в формате PCAD4.5) –
Предыдущий вариант конструкции усилителя в "железе" (без крышки), размещенный с тылу АС выглядит так (повернуто). Кстати, плату усилителя мощности (ИТУН по левому рисунку) можно также скачать в формате PCAD4.5

Перед первым включением необходимо установить резистор R17 в положение минимального сопротивления, R20 – в среднее положение. Так как запросто можно не угадать с фазой сигнала датчика, при попытке увеличения R17 система может возбудиться. В этом случае необходимо поменять местами выводы на динамике, и далее регулировкой R17 выставить требуемую глубину ЭМОС (доводим до границы самовозбуждения и несколько откручиваем назад). Может потребоваться подстройка С10 под основной резонанс датчика.
Результирующая АЧХ настроенного усилителя с ЭМОС без корректирующих узлов Z1 и Z3 (цепочка R25, C15 закорочена) – на следующем графике (снято с выхода пьезодатчика через дополнительный буферный каскад) –
Видим "хороший" ![]() ,
высокодобротный, выброс на АЧХ на 20Гц. Ничего хорошего он нам не сулит. Задействуем
коррекцию в узле Z3 – получаем гладенький спад АЧХ на НЧ с добротностью около
0,5 -
,
высокодобротный, выброс на АЧХ на 20Гц. Ничего хорошего он нам не сулит. Задействуем
коррекцию в узле Z3 – получаем гладенький спад АЧХ на НЧ с добротностью около
0,5 -
Зная, что выбором значения С15 можно изменять нижнюю граничную частоту, мы можем ее оптимизировать под примененную НЧ-головку. Регулировкой R20 также можно несколько влиять на ход АЧХ в ИНЧ области, но его лучше настраивать по форме переходного процесса (например, минимальной длительности ИНЧ "хвостов" при воздействии Tone Burst).
Результирующий вид АЧХ при задействовании входных ФНЧ 2-го и 4-го порядков – на следующих графиках.
Ну и контрольный замер микрофоном в ближней зоне –
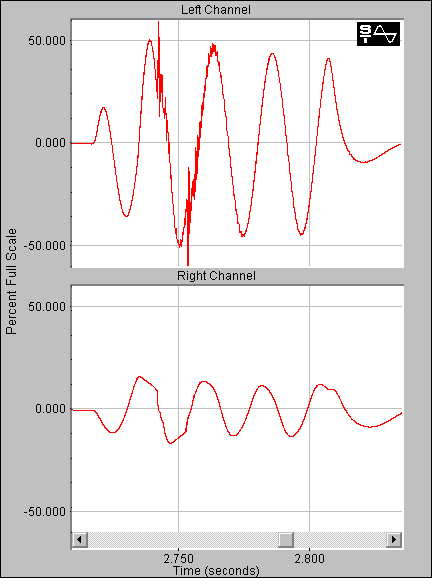
Вид переходного процесса при подаче сигнала «Tone Burst» различной частоты можно посмотреть на следующих осциллограммах. На верхних графиках – сигнал с датчика ускорения, на нижних – на выходе усилителя мощности.
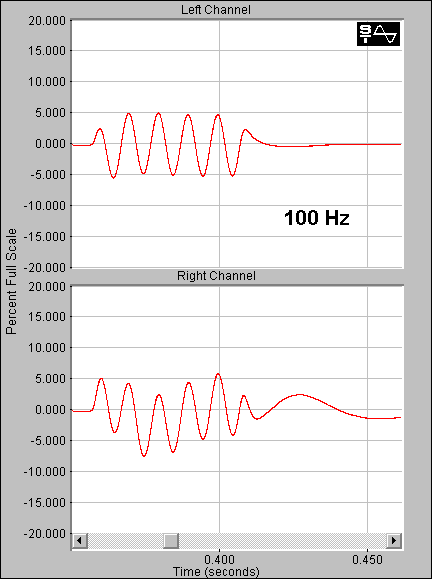
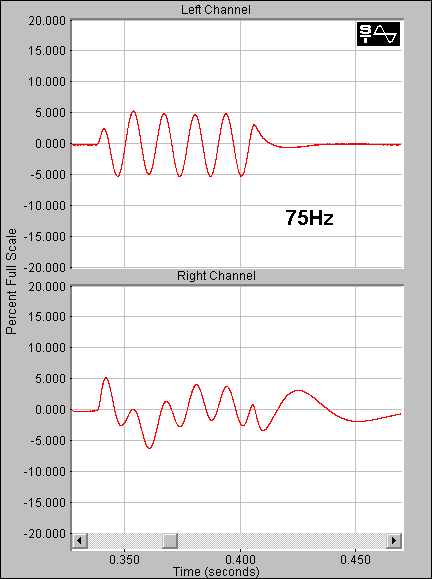
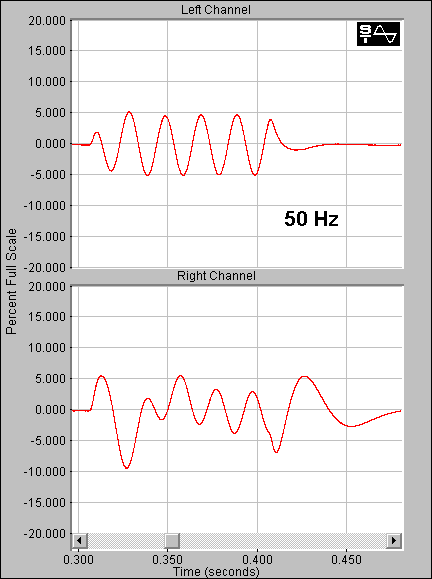
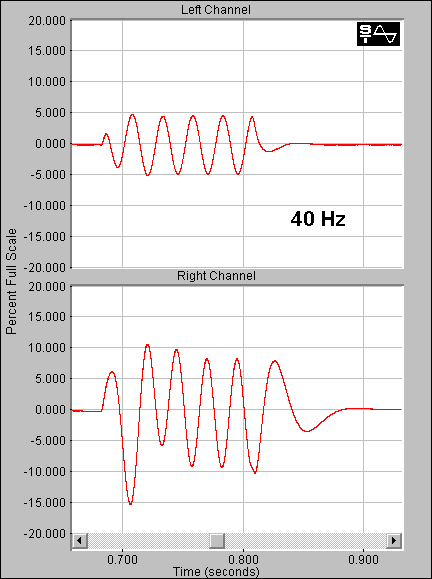
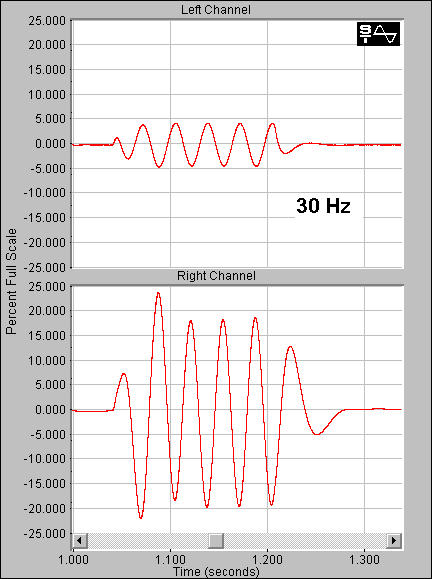
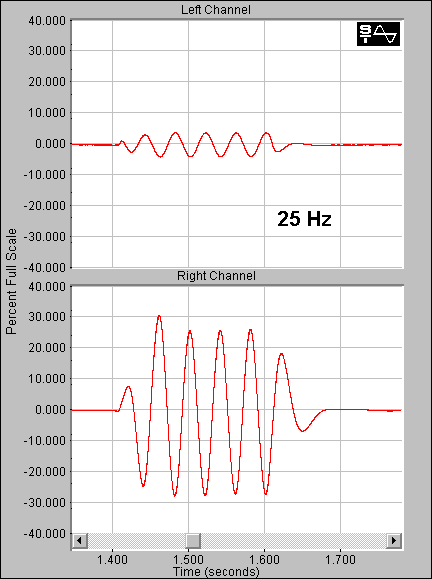
Поражает степень демпфирования диффузора - ЭМОС противится любым внешним воздействиям, стараясь при отсутствии сигнала удержать его в положении покоя, а при воспроизведении - точно отрабатывать входной сигнал.
Замер нелинейных искажений (с выхода датчика ускорения) дает следующие цифры –
30Гц - 1,6% | 40Гц - 0,69% | 50Гц - 0,4% | 60Гц - 0,26% | 75Гц - 0,36% | 100Гц - 0,43% | 150Гц - 0,63%
Еще несколько слов в пользу ИТУНа - его применение полностью исключает эффект термокомпрессии и тепловой интермодуляции в звуковой катушке, что важно на таких низких частотах, поскольку также приводит к искажениям огибающей сигнала, а также нивелирует влияние нелинейности импеданса головки, связанное с собственной нелинейностью магнитной цепи. Все это облегчает задачу ЭМОС по линеаризации передаточной характеристики и способствует уменьшению суммарных нелинейных искажений АС. А ведь этот параметр напрямую влияет на "локализуемость" НЧ-звена АС и субъективное восприятие "качества" баса.
Небольшой комментарий к необходимости лимитера/компрессора –
Естественно, с такой головкой трудно получить высокий уровень звукового
давления на НЧ. Тем более при таком неоптимальном объеме ЗЯ. Войдя во вкус
- можно перейти к использованию головок большего размера, с большим линейным
ходом, в объемах ЗЯ, приближенных к оптимальным. В этом случае можно опустить
нижнюю граничную частоту до 16-20Гц, без особого насилия электроники над механикой
![]() . Учитывая режим работы
усилителя мощности НЧ звена, когда пиковая мощность значительно превышает
среднюю, можно рекомендовать усилитель с двухуровневым питанием, как имеющий
больший КПД. Можно увеличить качество компрессора/лимитера, использовав в
качестве регулирующего элемента резисторный оптрон, подключенный параллельно
полевому транзистору J1, незначительно изменив схему. Должен заметить, что
использование других головок, существенно отличающихся по параметрам от вышеприведенных,
потребует пересчета параметров корректирующих звеньев Z2 и Z3.
. Учитывая режим работы
усилителя мощности НЧ звена, когда пиковая мощность значительно превышает
среднюю, можно рекомендовать усилитель с двухуровневым питанием, как имеющий
больший КПД. Можно увеличить качество компрессора/лимитера, использовав в
качестве регулирующего элемента резисторный оптрон, подключенный параллельно
полевому транзистору J1, незначительно изменив схему. Должен заметить, что
использование других головок, существенно отличающихся по параметрам от вышеприведенных,
потребует пересчета параметров корректирующих звеньев Z2 и Z3.
Ну, а теперь (не?)большая ложка дегтя в бочку с медом... Не следует забывать,
что каким бы качественным не был датчик ЭМОС и как хорошо бы не была настроена
и скорректирована петля ООС, общее качество системы остается напрямую зависимым
от основного ее элемента - головки громкоговорителя. Дело в том, что ЭМОС
способна корректировать только перемещение звуковой катушки и совершенно
не контролирует все остальные движущиеся части громкоговорителя. Этот факт
действительно часто остается за скобками при проектировании систем ЭМОС. Все
промежуточные элементы выпадают из рассмотрения, и кажется, что сигнал с датчика
представляет собой непосредственно звуковое давление системы. Однако это не
так. Разницу между сигналом с датчика и звуком, который мы слышим, определяет
целый ряд промежуточных элементов, таких как: диффузор (распределенная поверхность,
не обладающая абсолютной жесткостью), краевой гофр, центрирующая шайба, пылезащитный
колпачок, гибкие выводы звуковой катушки, диффузородержатель. Кроме этого,
остаются, всегда присутствующие, вибрации различных частей акустического оформления
(ящика). Все эти неидеальные элементы в реальной АС вносят свою отрицательную
лепту - дополнительную нелинейность и шумы, что не может быть исправлено датчиковой
ЭМОС, так как они находится вне петли ООС. Поэтому для достижения наилучших
результатов с такой системой ЭМОС (близких к требованиям Hi-End) следует изначально
выбирать качественные (а это, как правило, дорогие) головки, с большим линейным
ходом, с большой механической прочностью подвижной системы, с жестким диффузором,
способные работать на частотах ниже собственного резонанса с небольшими посторонними
призвуками, обусловленными перечисленными факторами. Качество изготовления
и продуманность акустического оформления также играет немаловажную роль. В
случае же применения головок низкого качества или неудачной конструкции корпуса,
затраты времени и средств на изготовление и настройку ЭМОС могут морально
не окупиться и не принести желаемого удовлетворения от полученного результата.
Хотя, я бы посоветовал самодельщикам сразу не унывать, и начинать эксперименты
с ЭМОС с того, что более доступно и не так затратно, а, получив и осмыслив
первые результаты, решать для себя куда идти дальше... Аппетит ведь
приходит во время еды ![]() Да и все-таки сам человек - мера всех вещей!
Да и все-таки сам человек - мера всех вещей!
Не зря я в самом начале страницы поместил рисунок Эшера с лестницей, по которой
можно бесконечно идти вниз (по частоте), ведущей вверх (качеству
звуковоспроизведения)... ![]()
Ну, а дальше - поживем - увидим...
Приношу благодарность всем участникам форума Вегалаб, принявшим участие в плодотворном обсуждении чернового варианта этой статьи.
При разработке системы с ЭМОС и подготовке этой статьи, была проработана,
перелистывая пожелтевшие ![]() страницы, следующая литература по этой теме (интернет не в счет):
страницы, следующая литература по этой теме (интернет не в счет):
1. Митрофанов Ю. Пикерсгиль А. "Электромеханическая обратная связь в
акустических системах" - Радио 1970 №5 с.25,26.
2. Акилов Б. "Еще раз об электромеханической обратной связи в усилителях
низкой частоты"- Радио 1973 №3 с.43,44.
3. Эфрусси М. "О воспроизведении низких звуковых частот" - Радио
1974 №7 с.32,33.
4. Митрофанов Ю. Пикерсгиль А. "Новое в электромеханической обратной
связи" - Радио 1975 №3 с.28,29.
5. Митрофанов Ю. "Усилитель с ЭМОС на интегральных микросхемах"
- Радио 1976 №6 с.32,33.
6. Салтыков О. "ЭМОС или отрицательное выходное сопротивление" -
Радио 1981 №1 с.40-44.![]()
7. Имас А. "Усилитель с ЭМОС по ускорению диффузора" Радио 1981
№9 с.42-44.![]()
8. Беспалов И. Пикерсгиль А. "И снова об ЭМОС" Радио 1985 №7 с.33-36.![]()
Мухамедзянов Наиль (aka Nota Bene) (c)2005 reanimator-h <на> yandex.ru