Содержание
1. Замануха ![]()
2. Основные принципы. (последняя редакция 22 января 2008)
3. Разновидности Э_ОС
3.1. Э_ОС по ускорению (последняя редакция 21 января 2008)
3.2. Э_ОС по скорости (последняя редакция 21 января 2008)
3.3. Э_ОС по положению (последняя редакция 21 января 2008)
4. Область и условия применения.
5. Мостовые схемы
6. Датчиковые схемы
6.1. ЭАОС
6.2. ЭМОС
6.3. ЭБОС
7. Практические конструкции
1. Замануха ![]()
....................................
2. Основные принципы.
АС, как говорится, имеют три проблемы - НЧ, СЧ и ВЧ ![]()
Проблема воспроизведения НЧ связана с несовершенством существующих
конструкций акустических излучателей и может быть решена с разумной достаточностью,
в том числе, применением универсального принципа обратной связи (ОС), когда
специальное устройство (датчик) регистрирует сигнал, имеющий непосредственное
отношение к воспроизводимому звуку (басу), и подает его на сравнивающее устройство,
находящееся на входе системы. В результате происходит выделение сигнала рассогласования
(сигнала ошибки) и его компенсация, что, в свою очередь, приводит к уменьшению
погрешностей всего НЧ-тракта, а именно: нелинейных (и интермодуляционных)
искажений, частотных искажений (нелинейность АЧХ), кроме того снижаются требования
к конструкции АС (в части габаритных размеров).
Конечно, в природе ничего даром не дается ![]() ,
поэтому применение этого метода возможно при соблюдении некоторых дополнительных
(ограничивающих) условий. Но, об этом позже.
,
поэтому применение этого метода возможно при соблюдении некоторых дополнительных
(ограничивающих) условий. Но, об этом позже.
Обычно, в качестве НЧ-звена используются электродинамические головки
излучения, причем, как правило, резонансная частота этих головок в акустическом
оформлении находится в рабочем диапазоне частот. С точки зрения систем автоматического
регулирования (САР) это означает, что такой объект регулирования (диффузор
ДГ) будет вести себя различно на разных частотах. Соответственно, характер
звукового давления (SPL), пропорционального ускорению движения диффузора,
на частотах выше и ниже резонансной частоты ДГ будут также значительно отличаться.
Это проявляется в различном виде АЧХ по SPL (переходе от прямой с наклоном
+12дБ/окт. через полюс на частоте резонанса ДГ к горизонтали) и ФЧХ (поворот
фазы практически на 180 градусов в области резонанса). Такие особенности накладывают
определенные требования к системе управления подобным объектом и ограничивают
максимально достижимую глубину ООС. Из теории САР мы знаем, что любая система
с отрицательной обратной связью (ООС) будет устойчива, если петлевое усиление
будет меньше единицы при условии перехода отрицательной ОС в положительную.
То есть, теоретически, по фазе есть поле допуска в +/-180 градусов, чтобы
ООС перешла в ПОС. Но, фазовый сдвиг в 180 градусов, присущий нашему объекту
управления (ДГ), уменьшает этот запас по фазе до значений +/-90 градусов по
краям диапазона, при правильном выборе структуры САР. Что же входит в понятие
петлевое усиление? Проще говоря - это произведение передаточных функций всех
звеньев, входящих в контур, охваченный обратной связью. Это упрощение связано
с тем, что в общем случае обратная связь может быть многопетлевой ![]()
В нашем случае в контур ОС нужно включить сравнивающее устройство
X1, устройство частотной коррекции Z2, усилитель мощности X2, объект управления
(ДГ), датчик, дополнительные цепи коррекции Z3. Задачей сравнивающего устройства
является выделение сигнала рассогласования между входным сигналом и сигналом,
полученным с датчика и характеризующим поведение ДГ. Устройство частотной
коррекции Z2 необходимо как раз для обеспечения условий устойчивости всей
системы, усилитель мощности согласует маломощный выход корректора с низкоомным
импедансом ДГ, обеспечивая необходимый для получения требуемого динамического
диапазона, уровень управляющего (воздействующего на ДГ) сигнала. Датчик, прямо
или косвенно, регистрирует интересующий нас физический параметр движения диффузора
ДГ, преобразуя его в электрический сигнал.
Дополнительный корректор Z3 может видоизменить в желаемом направлении
взаимосвязь между регистрируемым физическим параметром и входным сигналом.
Например, при достаточной глубине ЭМОС АЧХ системы по звуковому давлению линеаризуется
вплоть до ИНЧ. Но, к сожалению, ДГ не может эффективно воспроизводить столь
низкие частоты ввиду его конструктивных ограничений (объемное смещение). Поэтому
разумно ограничить полосу частот снизу, используя желаемую НЧ-аппроксимацию.
Если в звено Z3 ввести интегральную НЧ-компоненту 1-го порядка с полюсом,
соответствующим желаемой частоте среза, то можно сразу убить несколько зайцев
![]() - получить большую
устойчивость системы на ИНЧ за счет фазовой коррекции, одновременно увеличивая
глубину ООС на этих частотах, а АЧХ системы получит желаемый спад к ИНЧ 1-го
порядка (6дБ/окт). Как это делается - рассмотрим позже.
- получить большую
устойчивость системы на ИНЧ за счет фазовой коррекции, одновременно увеличивая
глубину ООС на этих частотах, а АЧХ системы получит желаемый спад к ИНЧ 1-го
порядка (6дБ/окт). Как это делается - рассмотрим позже.
Поскольку датчик, в общем случае, может регистрировать отличающиеся
от SPL параметры движения диффузора ДГ, и с помощью ЭМОС линеаризовывать их,
то на входе всей системы может потребоваться устройство Z1, необходимое для
выполнения задачи частотной коррекции, так как нас в конечном итоге интересует
равномерная АЧХ по звуковому давлению в определенном частотном диапазоне.
В общем виде функциональную схему Э_ОС можно представить так -
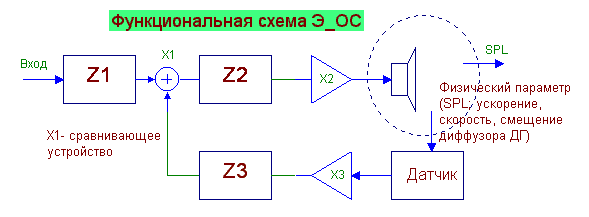
Рис.1.
Однако в таком виде эта функциональная схема не очень-то пригодна
для анализа и синтеза систем с ЭМОС - пока мы не формализуем параметры ДГ
и датчика, все рассуждения будут иметь флеймовый ![]() характер. Попробуем составить требуемую электромеханическую модель динамика.
Желательно, чтобы с "электрического" конца она эмулировала реальный
импеданс ДГ, а на "механическом/акустическом" конце мы могли бы
снимать параметры движения/звукоизвлечения диффузора. Конечно, здесь придется
пойти на некоторые упрощения, несущественные для нашей области применения
этой модели. Учтем, что основной движущей силой в ДГ является ток в звуковой
катушке, SPL пропорционален ускорению ее движения, порожденному этим током,
скорость движения ЗК получается интегрированием этого ускорения по времени,
а смещение интегрированием скорости движения ЗК по времени.
характер. Попробуем составить требуемую электромеханическую модель динамика.
Желательно, чтобы с "электрического" конца она эмулировала реальный
импеданс ДГ, а на "механическом/акустическом" конце мы могли бы
снимать параметры движения/звукоизвлечения диффузора. Конечно, здесь придется
пойти на некоторые упрощения, несущественные для нашей области применения
этой модели. Учтем, что основной движущей силой в ДГ является ток в звуковой
катушке, SPL пропорционален ускорению ее движения, порожденному этим током,
скорость движения ЗК получается интегрированием этого ускорения по времени,
а смещение интегрированием скорости движения ЗК по времени.
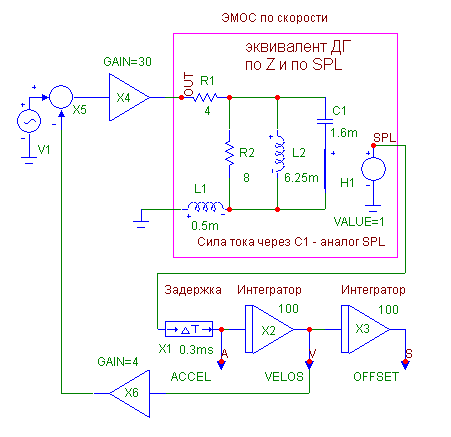
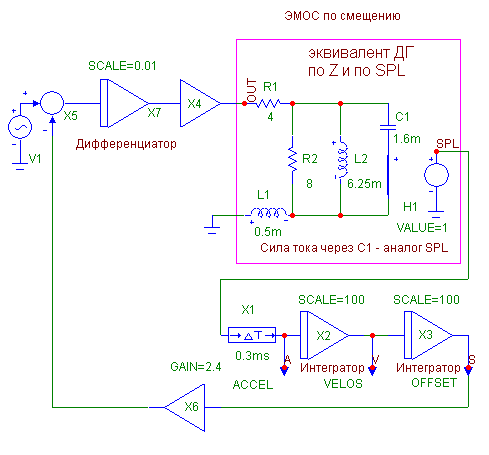
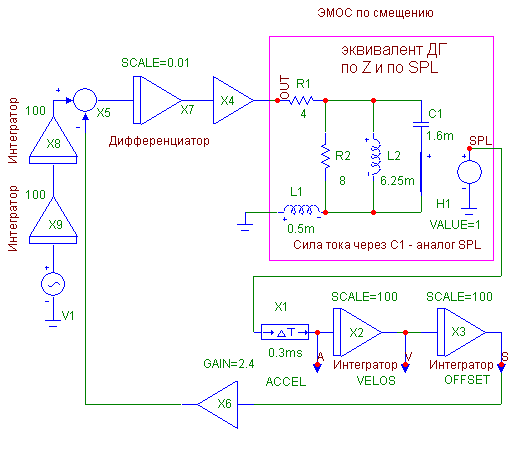
Эти моменты можно наблюдать на следующей иллюстрации, полученной
на электрической модели ДГ, составленной в соответствии с вышеперечисленными
допущениями. Модель описывает поведение ДГ в поршневом рабочем диапазоне как
по SPL, так и по электрическому импедансу. R1 - характеризует активное сопротивление
звуковой катушки, L1 - ее индуктивность. C1L2 - задают резонансную частоту
ДГ в акустическом оформлении, а R2 - определяет добротность резонансного горба,
или, что одно и то же, характеризует механические потери в системе. Эту модель
мы далее будем использовать при анализе различных систем с ЭМОС.
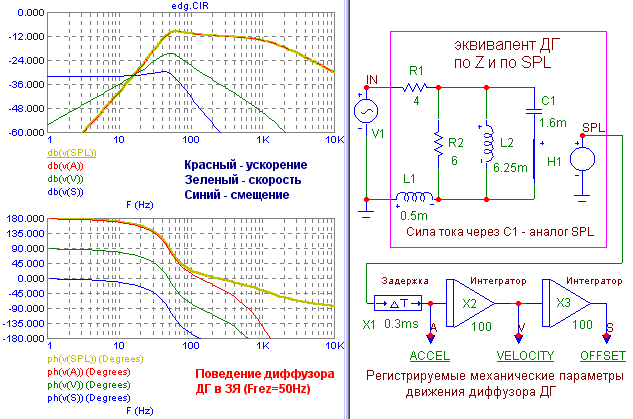
Рис.2.
В модели ДГ также учтен тот факт, что при некоторых методах измерения
имеется определенная задержка в получении сигнала с датчика (элемент Х1, хотя,
в принципе, он может быть уже отнесен к модели датчика). Чем же эта временная
задержка может помешать при построении систем с ЭМОС? На графиках ФЧХ хорошо
видно, что где-то, начиная со 100Гц, происходит нарастающее отставание по
фазе для всех графиков, что при замыкании петли ЭМОС будет приводить к уменьшению
устойчивости системы на верхней границе рабочего диапазона частот, независимо
от типа ЭМОС. Так, например, видно, что для ЭМОС по скорости (зеленый график),
теоретическим пределом вверх по частоте будет частота в 600Гц, при которой
ООС переходит в ПОС, если не предпринимать каких-то специальных мер по частотно-фазовой
коррекции.
Некоторые типы датчиков (электретные микрофоны, пьезо-акселерометры),
из-за конструктивных особенностей, не могут регистрировать статические значения
измеряемых физических величин, например, абсолютную величину давления ![]() ,
то есть неявно содержат в себе дифференцирующее звено с той или иной постоянной
времени. Это приводит к тому, что на ФЧХ появится дополнительный паразитный
фазовый сдвиг, также уменьшающий устойчивость ЭМОС, но уже на ИНЧ. Эти моменты
мы рассмотрим позднее, при анализе различных систем с ЭМОС.
,
то есть неявно содержат в себе дифференцирующее звено с той или иной постоянной
времени. Это приводит к тому, что на ФЧХ появится дополнительный паразитный
фазовый сдвиг, также уменьшающий устойчивость ЭМОС, но уже на ИНЧ. Эти моменты
мы рассмотрим позднее, при анализе различных систем с ЭМОС.
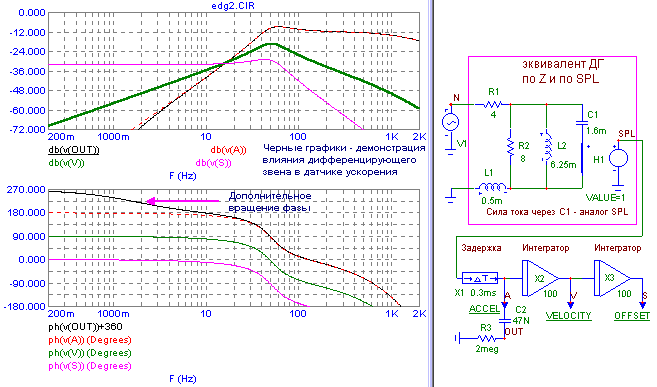
Рис.3.
Надо добавить, что эта модель не учитывает особенности поведения
ДГ за пределами его поршневого диапазона - частотного интервала, в котором
диффузор движется как единое целое, еще не переходя в режим зонного излучения.
Обычно для различных типов НЧ-головок, в зависимости от размеров и материала
диффузора, эта верхняя граничная частота лежит в диапазоне 300-800Гц. Выше
этих частот наблюдаются резкие изменения фазы и амплитуды колебаний, связанные
с локальными резонансами самого диффузора, которые также могут влиять на устойчивость
систем с ЭМОС и ограничивать максимально достижимую глубину ООС.
Интересно также взглянуть на поведении ДГ при возрастании его
добротности, например, под управлением ИТУН или в неоптимальном акустическом
оформлении. На АЧХ появляется резонансный выброс и перегиб фазы в этой области
приобретает большую крутизну. Это, в принципе, может дать бонус при работе
с ЭМОС - повысить глубину ООС на резонансной частоте и увеличить КПД системы.
Изменение фазовой характеристики в области резонанса на параметры ЭМОС не
влияет.
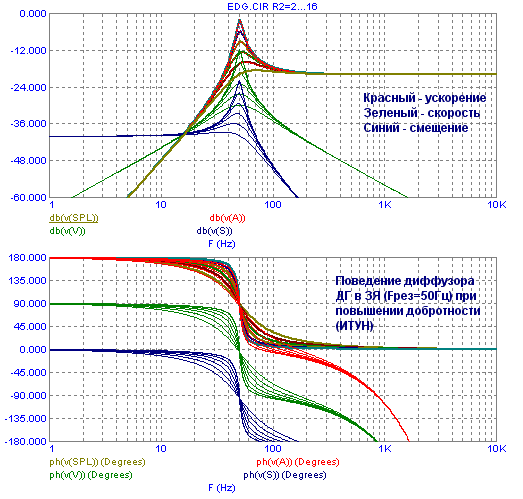
Рис.4.
Кроме того, под управлением ИТУН, исчезает спад АЧХ, вызванный
наличием индуктивности ЗК - L1, что может положительно сказаться на устойчивости
системы с ЭМОС на СЧ за счет меньшего фазового сдвига в системе.
3. Разновидности ЭМОС.
Рассмотрим подробнее, что же мы можем измерить у движущегося
диффузора. Первое, что приходит в голову - его смещение относительно положения
равновесия. Используя эту величину (выход OFFSET модели) в качестве сигнала
обратной связи, мы получим ЭМОС по положению (смещению). Еще можно измерять
моментальную скорость движения диффузора (выход VELOCITY) - и аналогично получить
ЭМОС по скорости. Датчики, измеряющие ускорение (выход ACCEL), позволяют организовать
ЭМОС по ускорению. А если учесть, что звуковое давление (SPL) на НЧ пропорционально
ускорению движения диффузора вуфера, то сигнал обратной связи, полученный
с микрофона, находящегося вблизи, также формирует ЭМОС по ускорению. Заметим,
что А.Сырицо ввел термин ЭАОС (электроакустическая обратная связь) для такого
подвида ЭМОС.
Деление на ЭМОС по положению, скорости, ускорению, несколько условно,
так как эти физические величины связаны между собой математическими операциями
дифференцирования/интегрирования. Например, скорость получается из смещения
дифференцированием по времени, или же интегрированием ускорения по времени
![]() Но, постараемся
все же придерживаться такой классификации разновидностей ЭМОС по наименованию
регистрируемого физического параметра.
Но, постараемся
все же придерживаться такой классификации разновидностей ЭМОС по наименованию
регистрируемого физического параметра.
3.1. ЭМОС по ускорению
Рассмотрим на нашей модели ФЧХ динамика по ускорению, фиксируемого
акселерометром (красный график на рис.2). Видно, что при возрастании частоты,
фаза изменяется (отстает) от нуля до величин, превышающих 180 градусов; причем
на частоте резонанса/перегиба наблюдаем сдвиг фазы в -90 градусов. Если не
использовать какой-либо коррекции в петле ООС, то станет понятно, что на ИНЧ
практически нет запаса по фазе для обеспечения устойчивости ЭМОС, а на СЧ/ВЧ
мы имеем избыток петлевого усиления, и фаза сигнала с акселерометра за счет
временной задержки успевает достигнуть 360 градусов, прежде чем петлевое усиление
упадет до значений менее 1 (вспоминаем критерий устойчивости ![]() ).
Эти моменты можно рассмотреть на следующем рисунке, где моделируется поведение
такой системы при увеличении петлевого усиления:
).
Эти моменты можно рассмотреть на следующем рисунке, где моделируется поведение
такой системы при увеличении петлевого усиления:
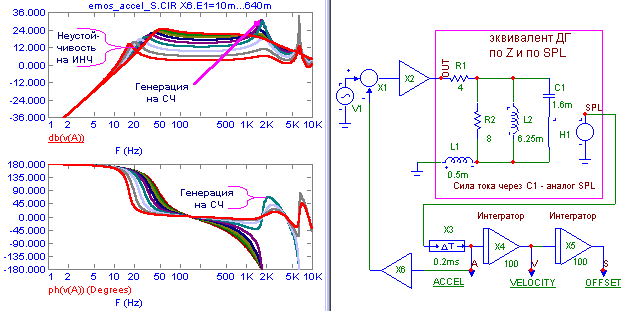
Рис.5.
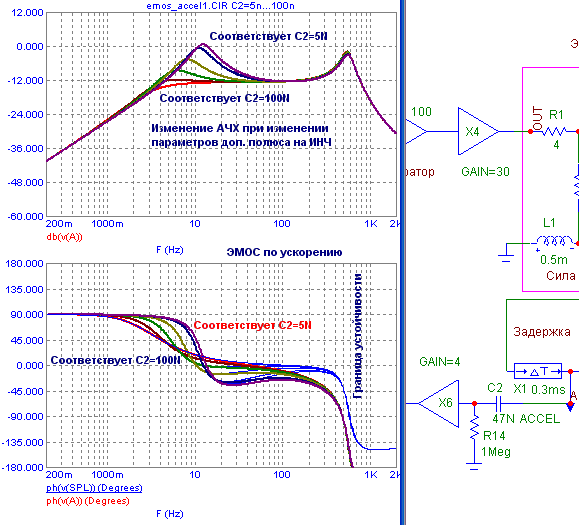
Очевидно, что для правильного построения ЭМОС по ускорению нам
необходимо в петлю ООС ввести корректирующее устройство, которое бы обеспечивало
постоянный фазовый сдвиг в 90 градусов для создания запаса по фазе на ИНЧ,
и имело спадающую к ВЧ АЧХ, чтобы обеспечить уменьшение петлевого усиления
на верхней границе рабочего диапазона. На эту роль лучше всего подходит обычный
интегратор ![]() . В этом
случае получится вот так -
. В этом
случае получится вот так -
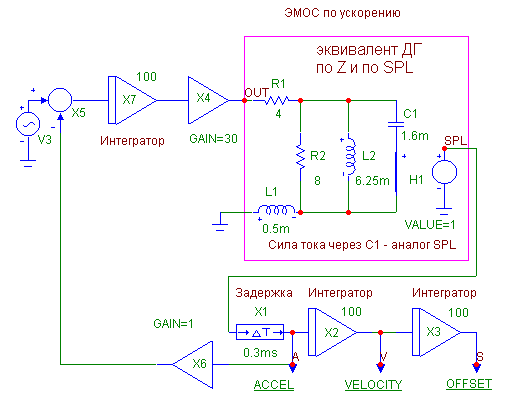
Рис.6.
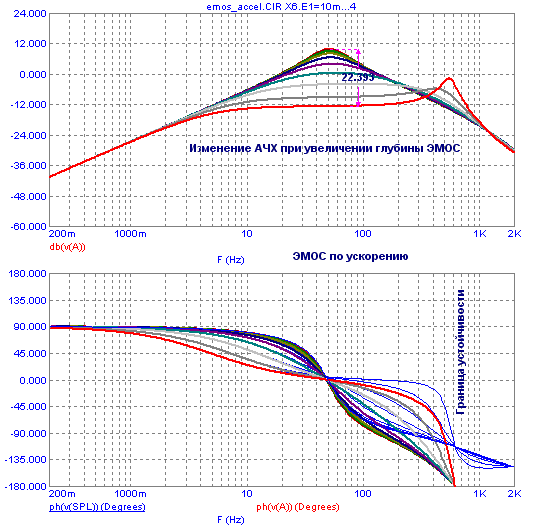
Рис.7.
И устойчивость на ИНЧ значительно повысится, и условия для самовозбуждения на СЧ устранятся. Может быть, понятнее будет эти моменты посмотреть на модели с разорванной ООС:
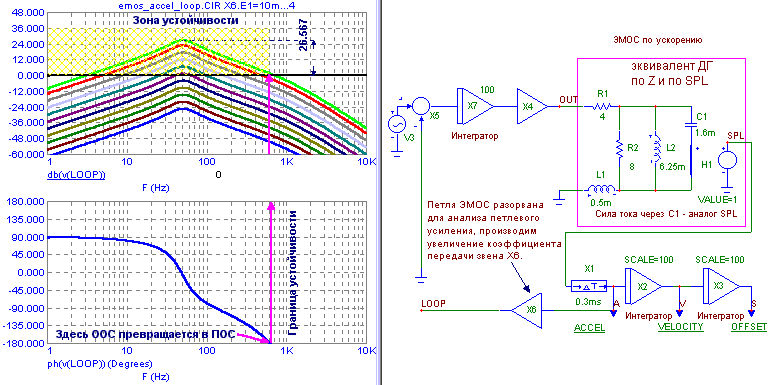
Рис.8.
Подобное поведение АЧХ на ИНЧ (характерное АЧХ апериодического
звена) соответствует применению датчиков типа ADXL, которые регистрируют абсолютную
величину статического ускорения. Их выходной сигнал содержит даже информацию
о гравитационном поле Земли (ускорении свободного падения (G) ![]() )
и зависит от ориентации датчика. Другие типы датчиков, как уже было отмечено,
неявно содержат дифференцирующее звено, и его параметры влияют на устойчивость
системы на ИНЧ. Наглядно это видно при моделировании -
)
и зависит от ориентации датчика. Другие типы датчиков, как уже было отмечено,
неявно содержат дифференцирующее звено, и его параметры влияют на устойчивость
системы на ИНЧ. Наглядно это видно при моделировании -
Таким образом, раскачка диффузора ДГ при звуковоспроизведении может быть обусловлена недостаточным запасом устойчивости на ИНЧ, определяемым имеющимся запасом по фазе. Дополнительные полюсы на ИНЧ, еще больше осложняющие жизнь тем, что "отъедают" имеющийся запас устойчивости, появляются из-за неидеальности добавочного интегратор (корректор Z2), "закрытого" входа УМ (или УМ с ограниченной на ИНЧ полосой), поэтому желательно, чтобы эти полюсы были разнесены друг от друга по частоте и находились далеко за пределами рабочей полосы ЭМОС.
Under construction ![]()
------------------------------
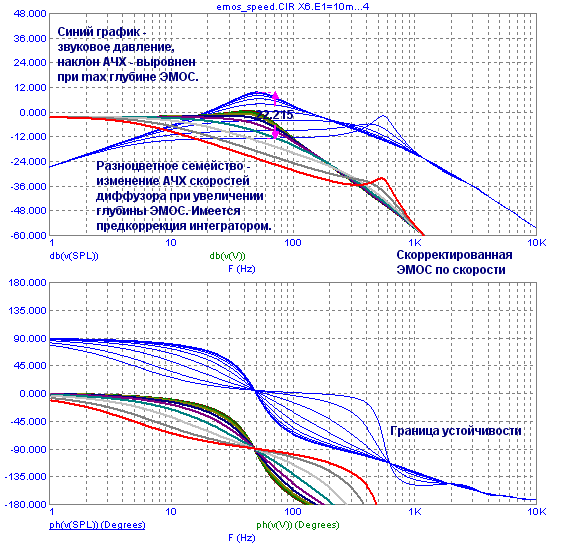
3.2. ЭМОС по скорости
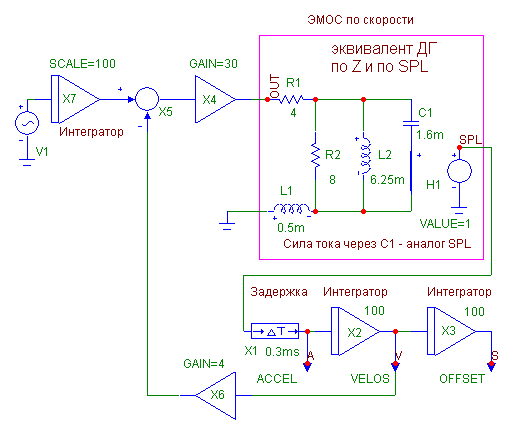
Посмотрим, что получится, при использовании "скорости"
в качестве сигнала ООС. В петлю ЭМОС входят - сравнивающее устройство Х5,
усилитель мощности Х4, уже рассмотренная модель ДГ с датчиком, и усилитель
сигнала ООС -Х6. Будем увеличивать петлевое усиление за счет изменения усиления
Х6.
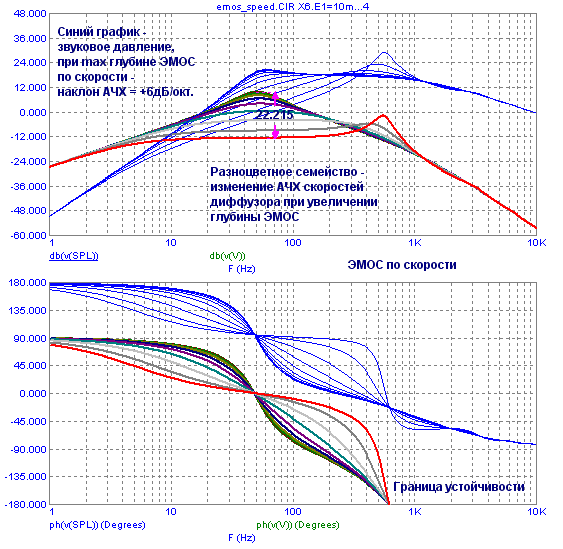
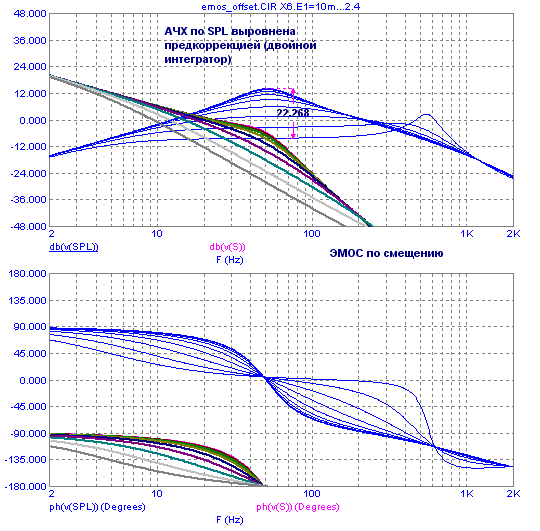
Наблюдаем следующее: на АЧХ - "макушка" графика скорости постепенно уплощается, линеаризуясь в диапазоне частот 10...200Гц, одновременно на АЧХ вырастает "горбик" на верхней граничной частоте ЭМОС в районе 500...600Гц. При этом график звукового давления (SPL) также уплощается, но приобретает наклон в +6дБ/окт. При этом максимальная глубина ЭМОС получается в районе 20...24дБ. Для получения линейной и горизонтальной АЧХ по SPL в систему необходимо ввести предкоррекцию - интегратор на входе.
При этом АЧХ/ФЧХ приобретают следующий вид -
Можно проанализировать влияние задержки в цепи ЭМОС на вид АЧХ/ФЧХ -
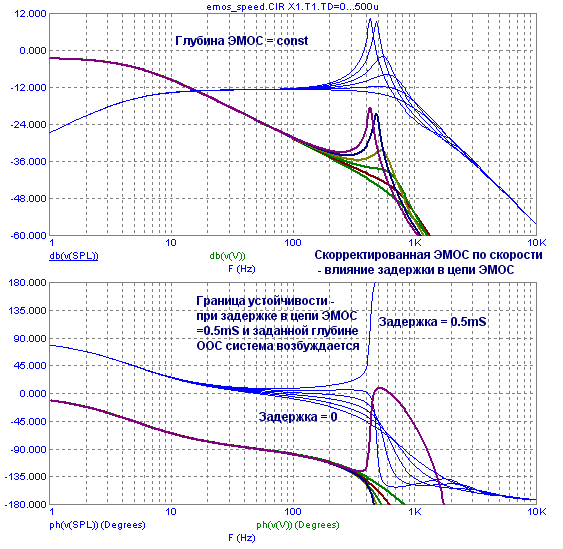
Понятно, что чем эта задержка меньше, тем лучше ![]()
Under construction ![]()
--------------------------------
3.3. ЭМОС по положению
Для ЭМОС по положению в петлю ООС необходимо ввести дифференциатор,
который оптимизирует ФЧХ системы. При увеличении глубины ЭМОС по положению
с помощью элемента Х6 видим следующую картину -
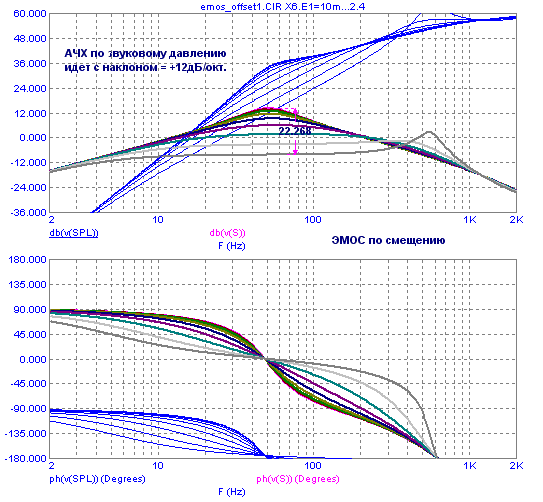
И тут, опять видим, что глубина полученная ЭМОС соответствует
глубине ЭМОС по скорости ![]()
Только опять необходимо ввести предкоррекцию во входной сигнал -12дБ/окт двумя
интеграторами, чтобы получить горизонтальную АЧХ по SPL -
Under construction ![]()
----------------
5. Одним из наиболее важных звеньев ЭМОС, определяющих качество
всей системы является датчик, с которого снимается сигнал обратной связи.
Физические принципы, лежащие в основе методов преобразования,
могут быть самыми различными - оптические, электромагнитные, емкостные, пьезоэлектрические
и т.д. Часть этих принципов позволяет получить прямое преобразование измеряемой
величины в напряжение (ток), а часть - косвенно - через другие физические
величины.
Например, как правило, работа емкостных преобразователей основана
на детектировании ВЧ-напряжения, снимаемого с подвижных обкладок, оптических
- на замере изменения интенсивности светового потока, перекрываемого подвижной
заслонкой и т.д. При прямом преобразовании воздействие измеряемой физической
величины приводит непосредственно к генерации выходного сигнала датчика.
Например, электромагнитный датчик скорости вырабатывает сигнал
пропорциональный скорости перемещения витков катушки в магнитном поле, пьезоэлектрический
элемент генерирует заряд, пропорциональный приложенному усилию. Ясно, что
чем меньше стадий во внутреннем преобразовании датчика, тем он будет точнее
и проще. В понятие точность здесь включается не только свойство линейности
преобразования, но и понятие динамического диапазона (отношение сигнал/шум),
а также устойчивость к возмущающим факторам. Эти критерии немаловажны при
выборе типа датчика для ЭМОС.
Поскольку самым неидеальным (нелинейным во всех отношениях) звеном
является динамическая головка (электроакустический преобразователь), желательно,
чтобы датчик ЭМОС, по возможности, включал все эти нелинейности внутрь петли
обратной связи.
Известны датчики, позволяющие контролировать параметры перемещения
звуковой катушки ДГ,- смещение, скорость, ускорение. Их использование в ЭМОС
позволяет значительно улучшить параметры НЧ-звена АС - расширить полосу эффективно
воспроизводимых частот в сторону инфра-НЧ и улучшить линейность перемещения
диффузора. Но комплексного улучшения звучания не получается, так как в этом
случае ОС контролирует только движение звуковой катушки, оставляя за бортом
ЭМОС ряд элементов ДГ, также влияющих на качество воспроизведения звука. Кроме
того это бывает связано с необходимостью доработки динамика, чтобы разместить
датчик на диффузоре. Это часто является основным тормозящим фактором против
применения ЭМОС.
Датчик в виде микрофона, расположенного перед диффузором НЧ-динамика,
в принципе, позволяет максимально улучшить качество ЭМОС, не требует доработки
динамика, но при этом он сам должен обладать выдающимися ![]() параметрами, а значит и ценой... От такого микрофона требуется большая перегрузочная
способность по SPL (ближняя зона!) и очень низкая нижняя граничная полоса
пропускания (единицы герц). Кроме того, его необходимо хорошо виброизолировать
от корпуса АС, на котором он должен быть закреплен, иначе не избежать паразитного
влияния вибрации корпуса. В принципе, эта инженерная задача решается, имеются
работающие конструкции АС с ЭМОС на этом виде датчика.
параметрами, а значит и ценой... От такого микрофона требуется большая перегрузочная
способность по SPL (ближняя зона!) и очень низкая нижняя граничная полоса
пропускания (единицы герц). Кроме того, его необходимо хорошо виброизолировать
от корпуса АС, на котором он должен быть закреплен, иначе не избежать паразитного
влияния вибрации корпуса. В принципе, эта инженерная задача решается, имеются
работающие конструкции АС с ЭМОС на этом виде датчика.
Обсуждение проходит на форуме Vegalab'a.